⛳️ 推荐
前些天发现了一个巨牛的人工智能学习网站,通俗易懂,风趣幽默,忍不住分享一下给大家。点击跳转到网站。
文章目录
引入
Apollo 开放平台是一个开放的、完整的、安全的平台,将帮助汽车行业及自动驾驶领域的合作伙伴结合车辆和硬件系统,快速搭建一套属于自己的自动驾驶系统,目前已经升级迭代到Apollo beta 版本。

前提条件
已本地安装 Dreamview,若未安装,可以去Apollo社区查看安装说明进行操作
步骤一:新建场景集
在本地进行仿真系统调试前,您需要先创建好场景集。参见 场景制作。
注意:场景类型 选择 线下仿真。
步骤二:同步场景集至本地
安装仿真插件。
参考 将场景集同步到仿真环境 中的方式二安装仿真插件。
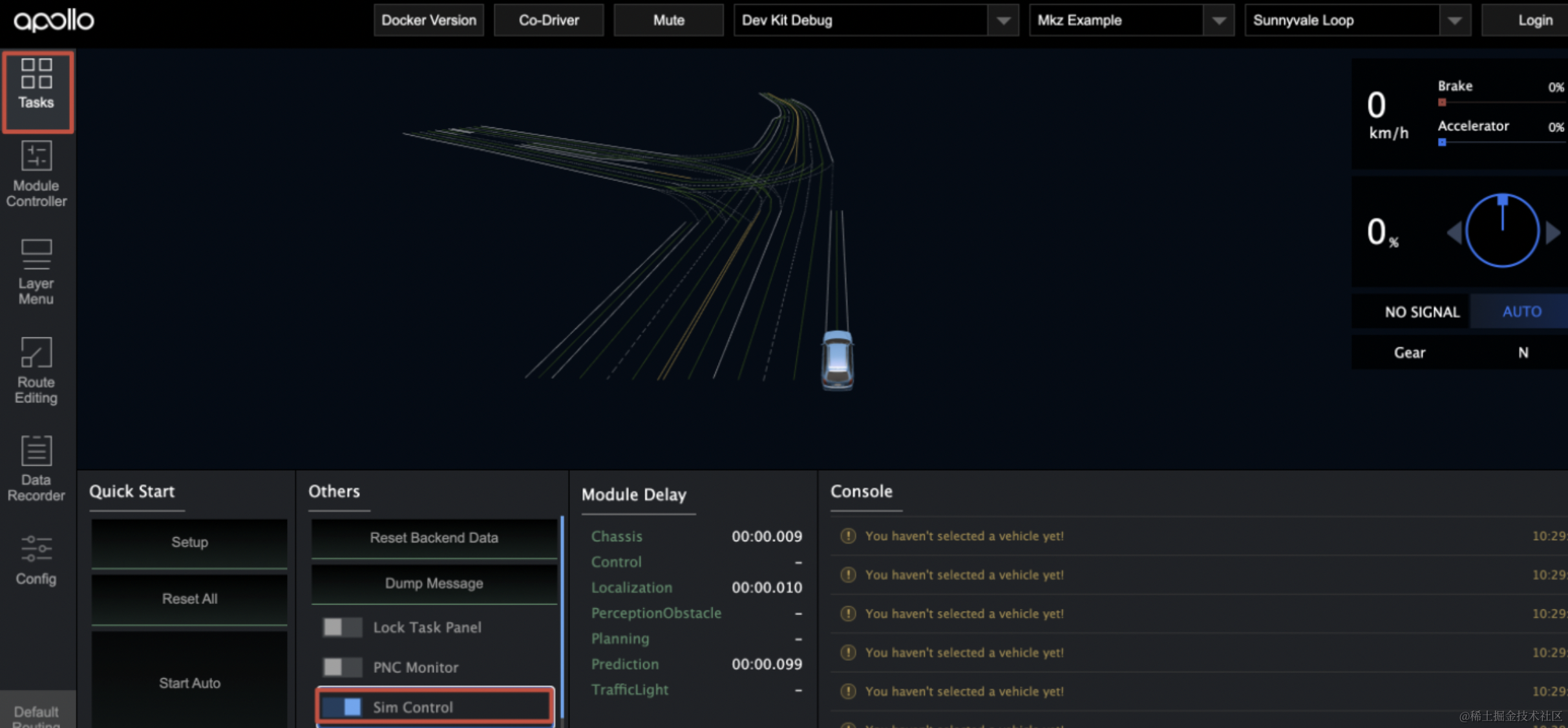
在 Dreamview 中打开 Sim Control:
单击左侧 Tasks,在下方 Others 页签打开 Sim Control,即可进入仿真模拟控制:
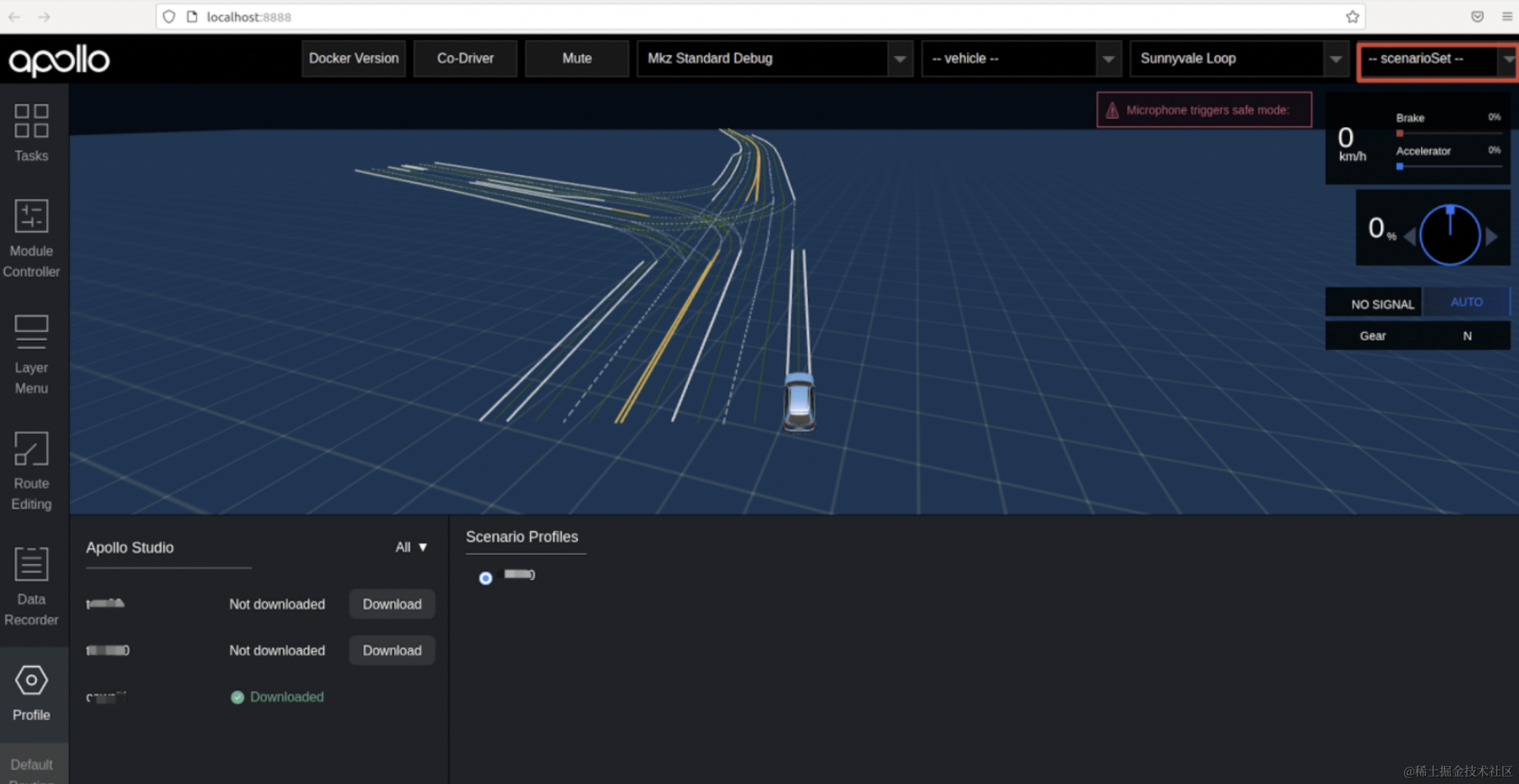
单击左侧 Profile。
在 Apollo Studio 中,可以看到您所创建的云端线下仿真场景集。
选择您想要下载到本地的场景集,并单击 Download。
在 Scenario Profiles 中,可以看到下载到本地的场景集。
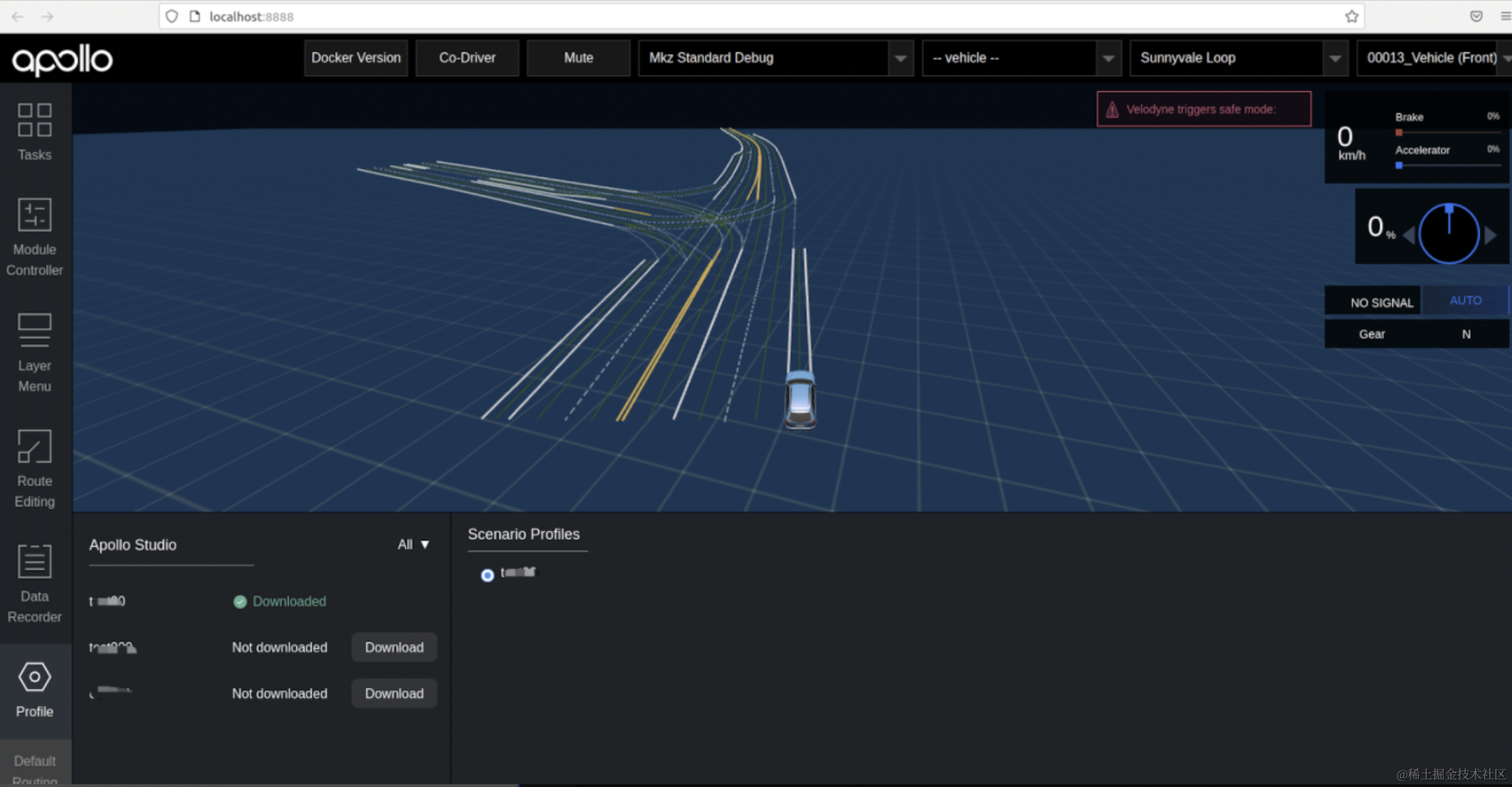
选择您想要本地调试的场景集。
在右上方 scenarioSet 中,选择您添加的场景。
步骤三:选择目标点
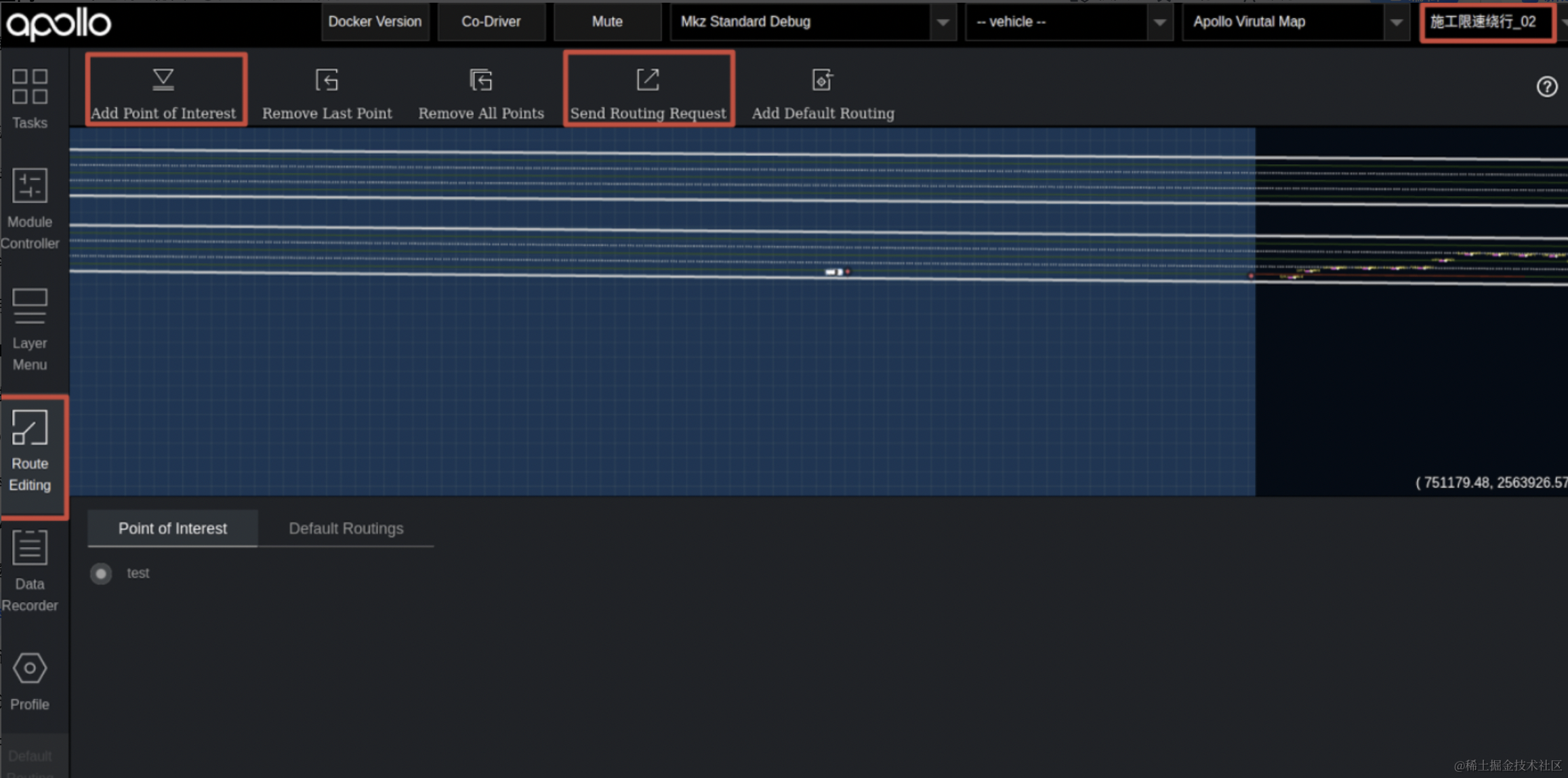
在 Dreamview 中,单击左侧栏 Route Editing。
单击 Add Point of Interest,在地图中选取一个起点。
在车道线中选择一个终点作为目标点。
单击 Send Routing Request,发送添加的 routing 点。
步骤四:开启相关模块
在 Dreamview 中开启 Planning 和 Routing 模块:
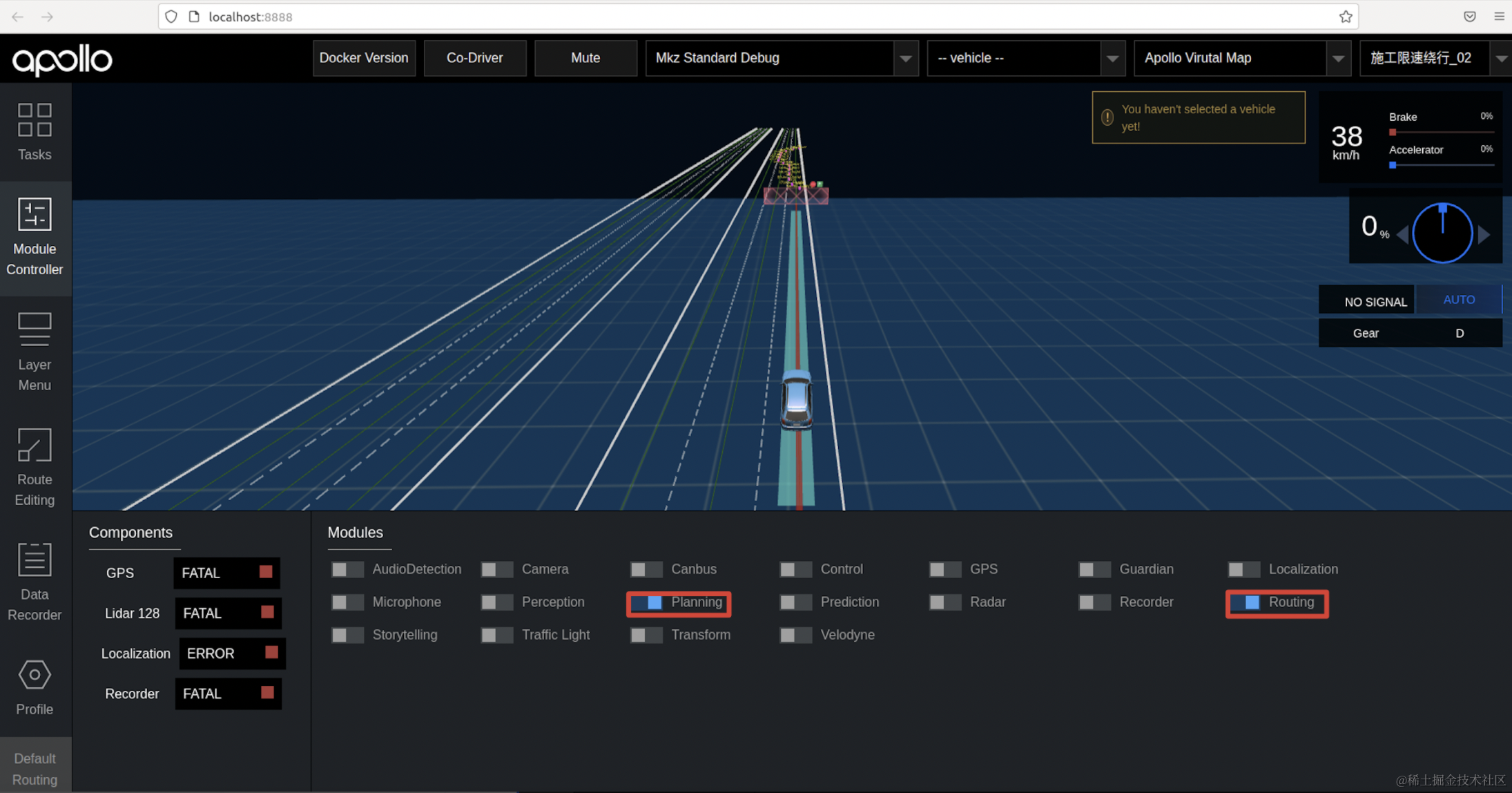
可见 routing 模块会在地图中搜索出可行的路径,planning 模块将指导车进行决策和局部规划,进而指导车进行运动,红线是 routing 在地图中搜索出的路径,蓝色的轨迹是 planning 模块实时规划的局部路径。
步骤五:本地仿真调试 planning 模块
以调试巡航速度为例:
在代码
apollo/modules/planning/conf找到配置文件planning.conf修改planning_upper_speed_limit=5, default_cruise_speed=2。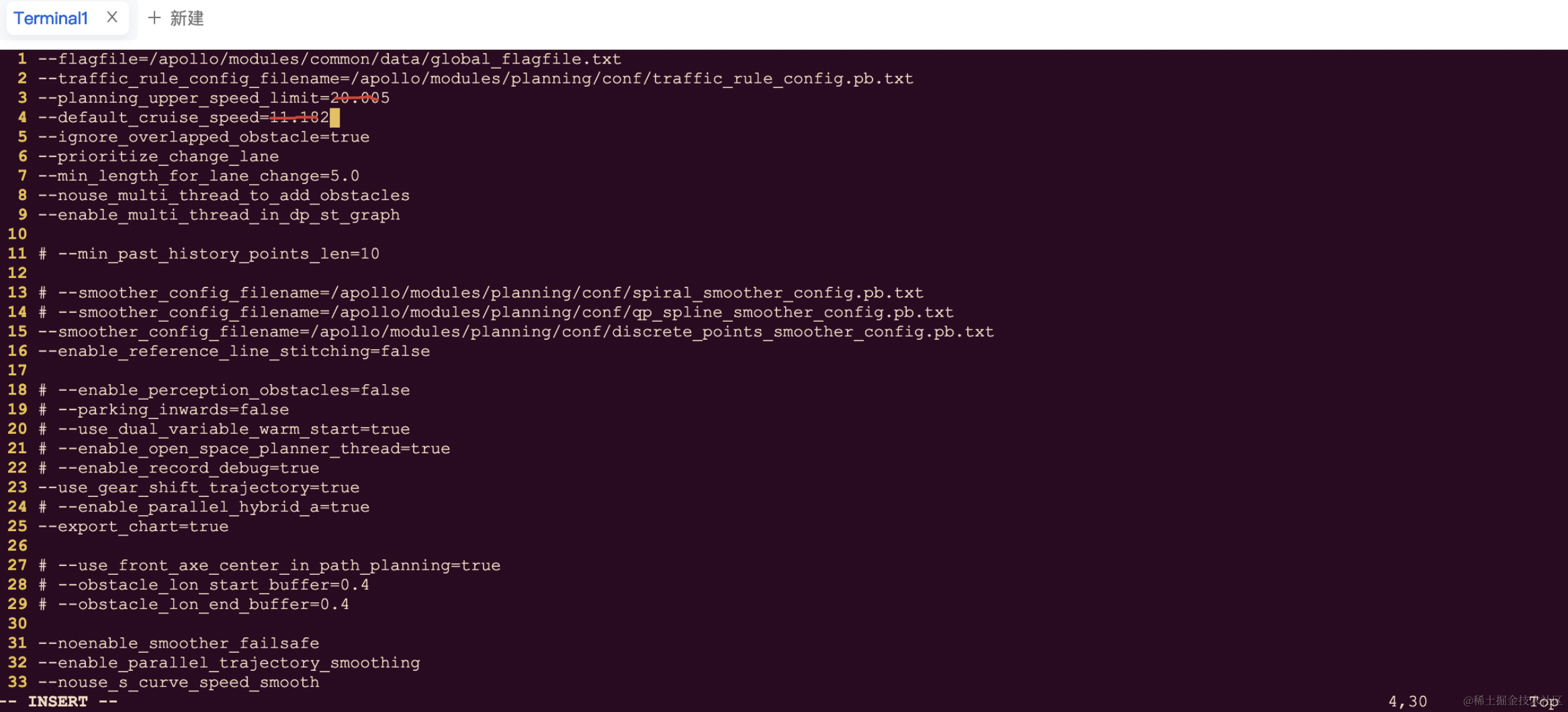
保存文件。
重启 planning 模块。
重新发送 routing request 查看车辆运行速度是否发生变化。
配置文件参数修改前:
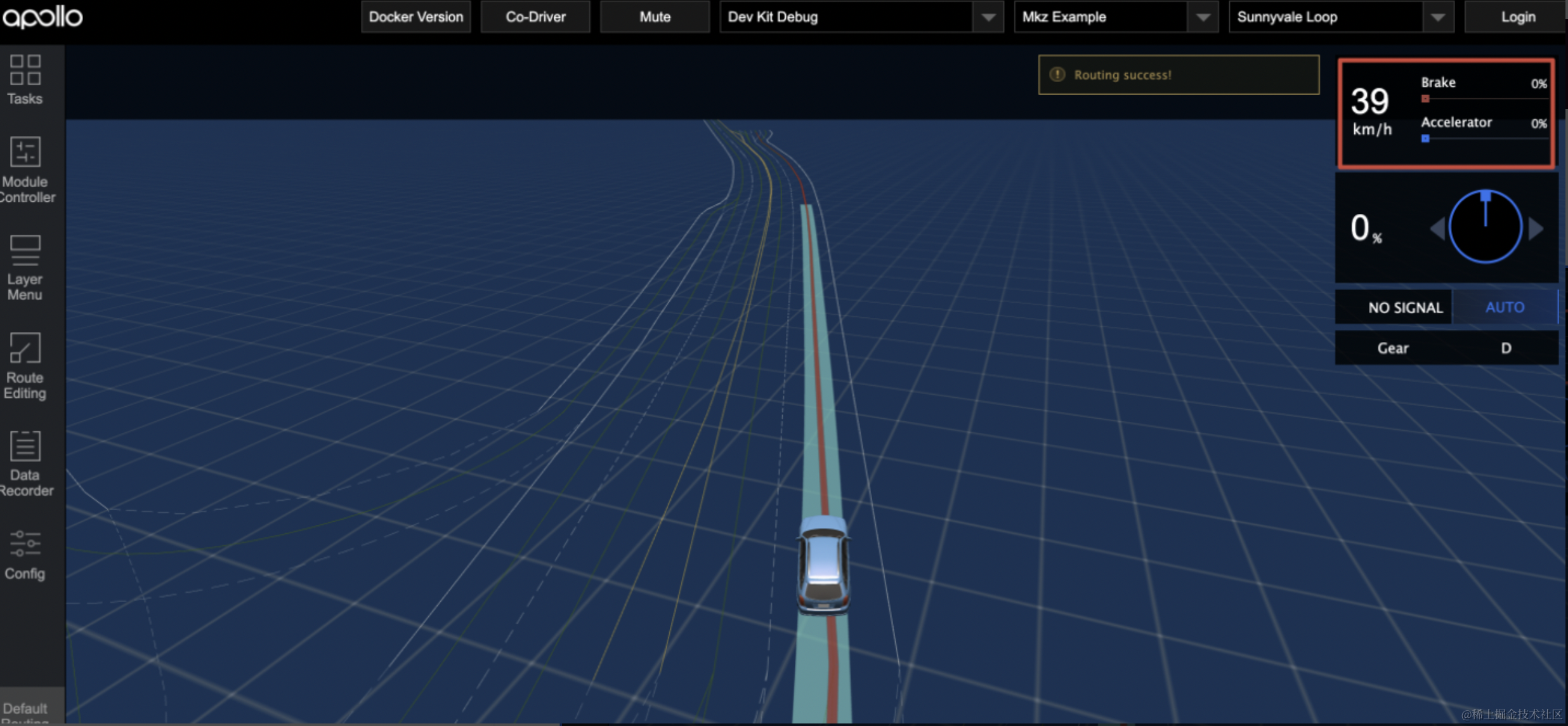
配置文件参数修改后:
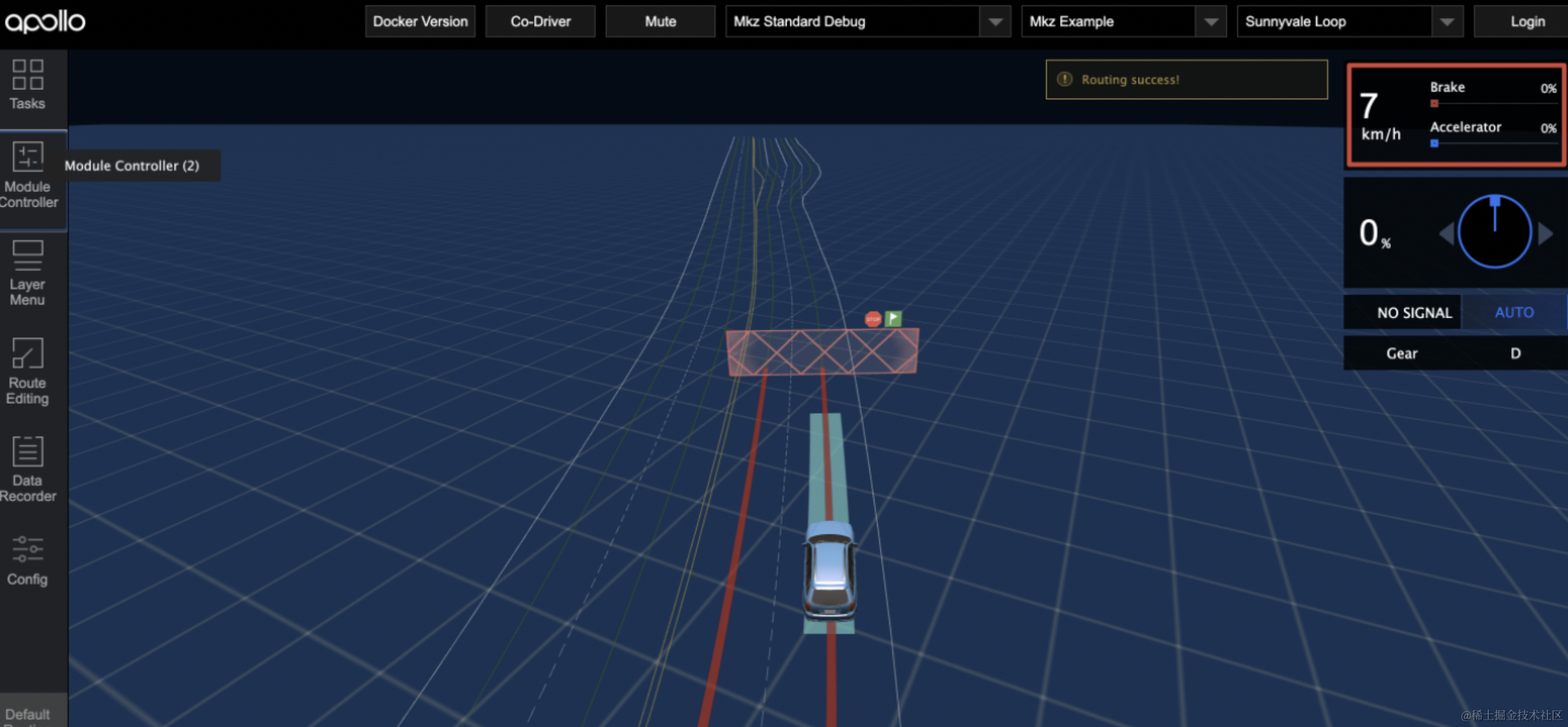
注意:PNC monitor上显示的速度单位为km/h,planning.conf配置文件中的速度单位为m/s。
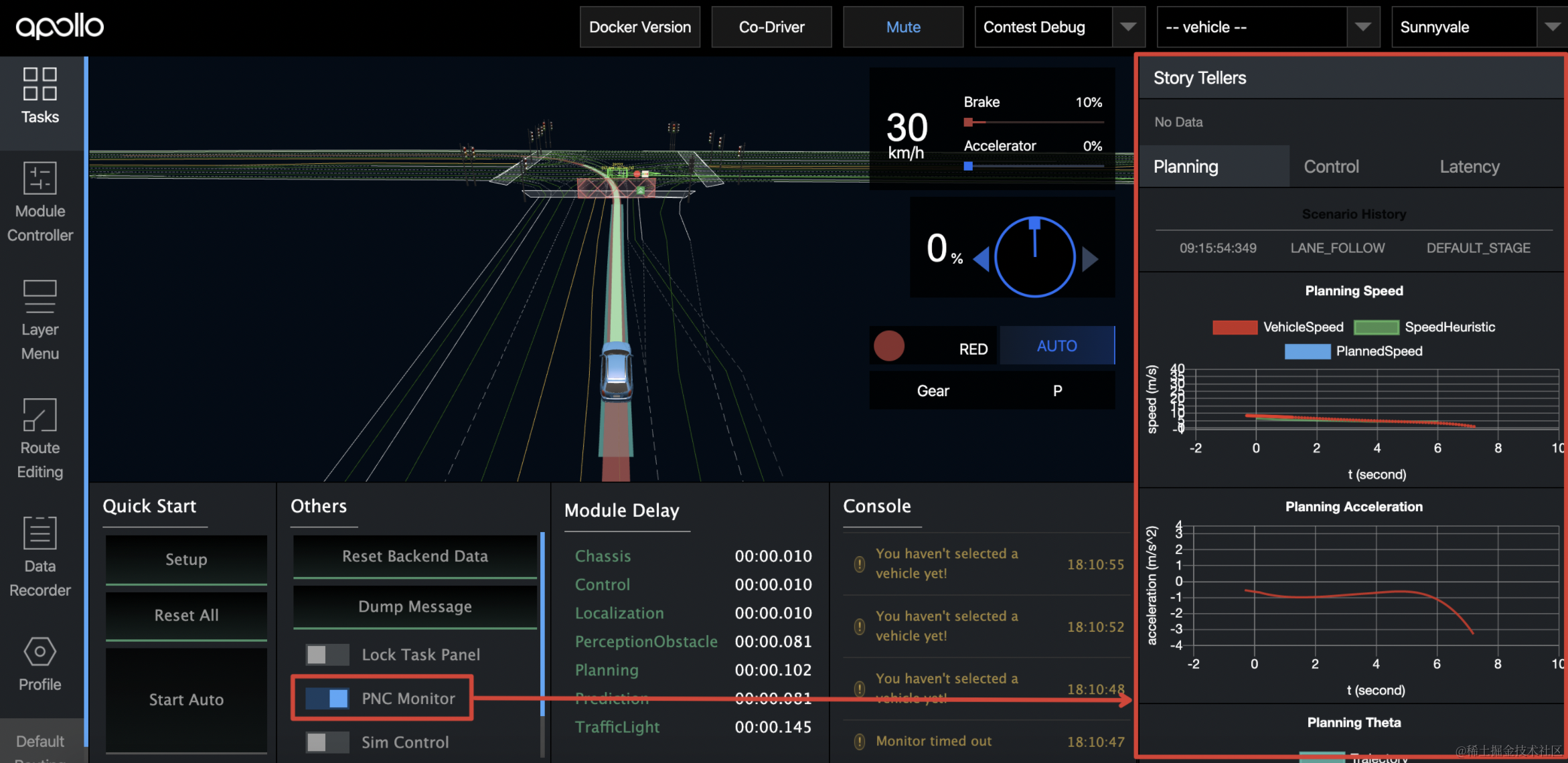
步骤六:查看 PNC monitor 数据
点击 Tasks 模块,打开 PNC monitor,右侧显示 PNC 相关数据信息。




















![[R] Why data manipulation is crucial and sensitive?](https://img-blog.csdnimg.cn/direct/4718e637586c4cc5aaf05074c65a8885.png)