系列文章目录
前言
之前学习了FreeRTOS,但是一直想深入学习,但是没有人指导,又不知道该如何学习,于是再学习一个操作系统看看情况。
简要介绍
RT-Thread是一个物联网操作系统,几乎支持所有主流的MCU和Wi-Fi芯片,实时多线程操作系统,主要用在32位的MCU上面。物联网(Internet Of Things,IoT),RT-Thread是一个IoT OS。
有标准版本,裁剪后只需要3KB Flash、1.2KB RAM 内存资源的 NANO(轻量级) 版本,还有在标准版本上增加了用户态创造而来的smart版本。
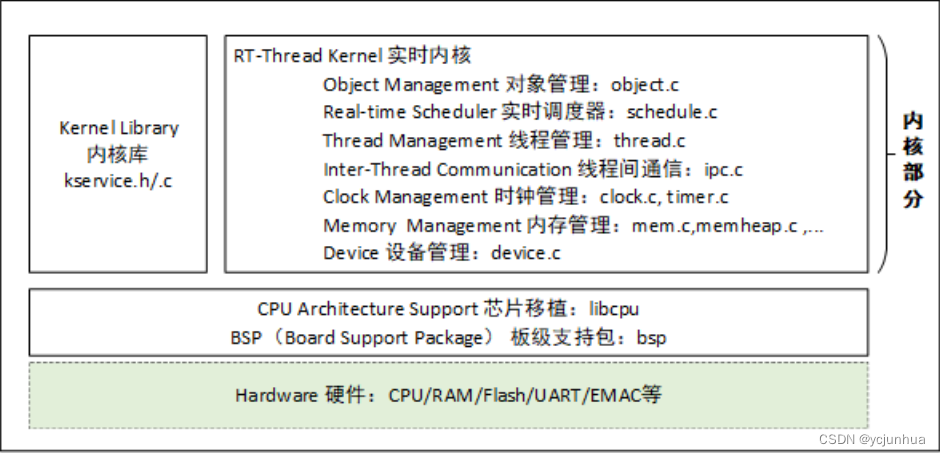
和FreeRTOS相比,主要具有一个丰富的中间层组件:这也是后面学习的重点

利用RT-Thread_Studio可以傻瓜式完成环境的配置

配置环境
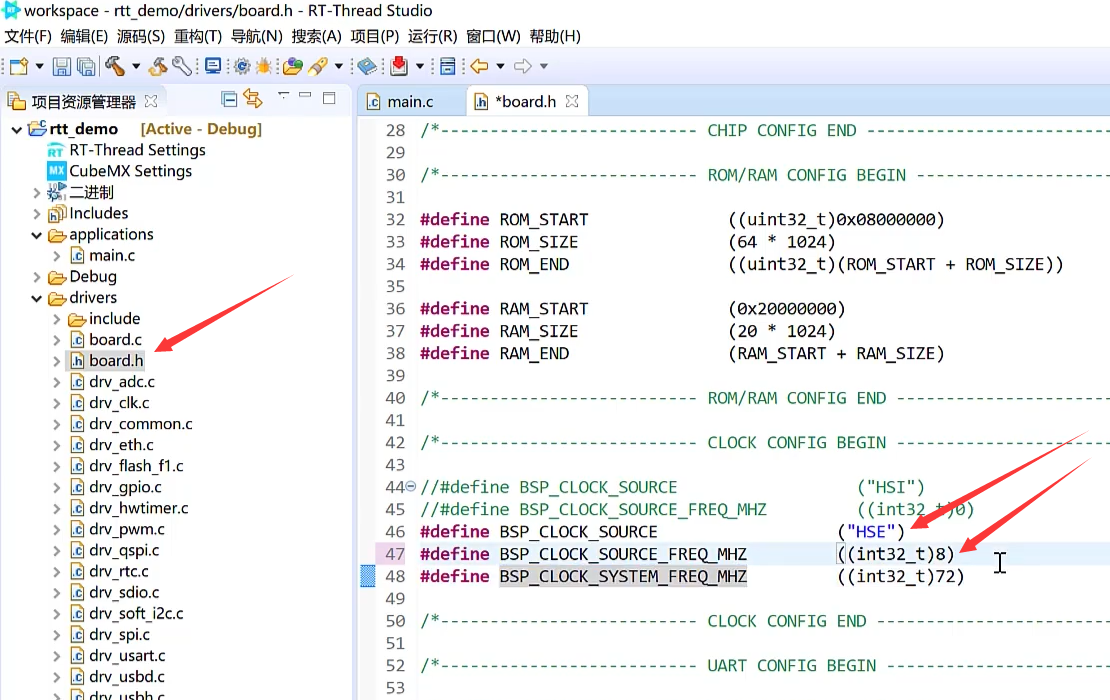
修改工作时钟
修改系统工作时钟为外部的8MHz的晶振:(创建中也有所提示)

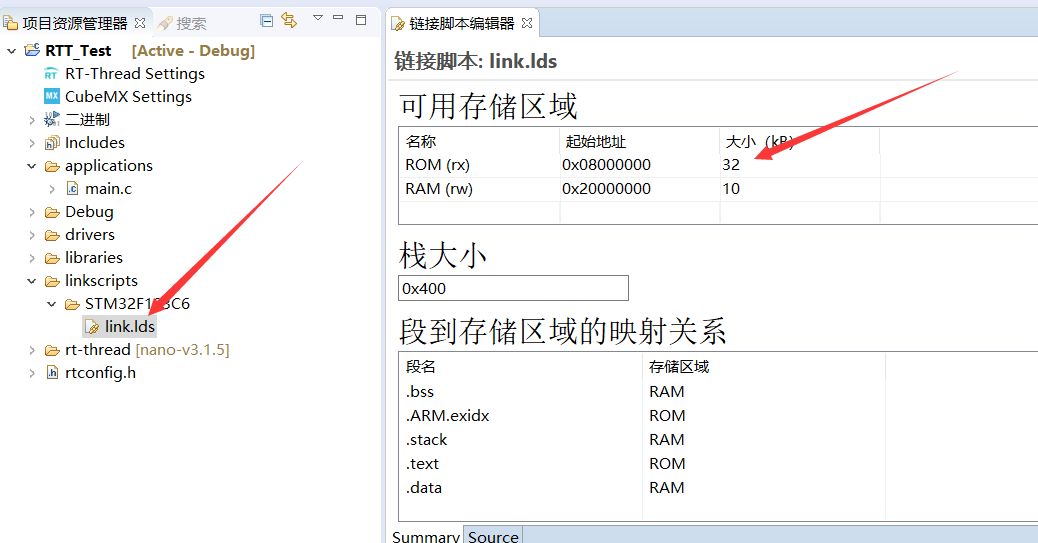
更改ROM空间
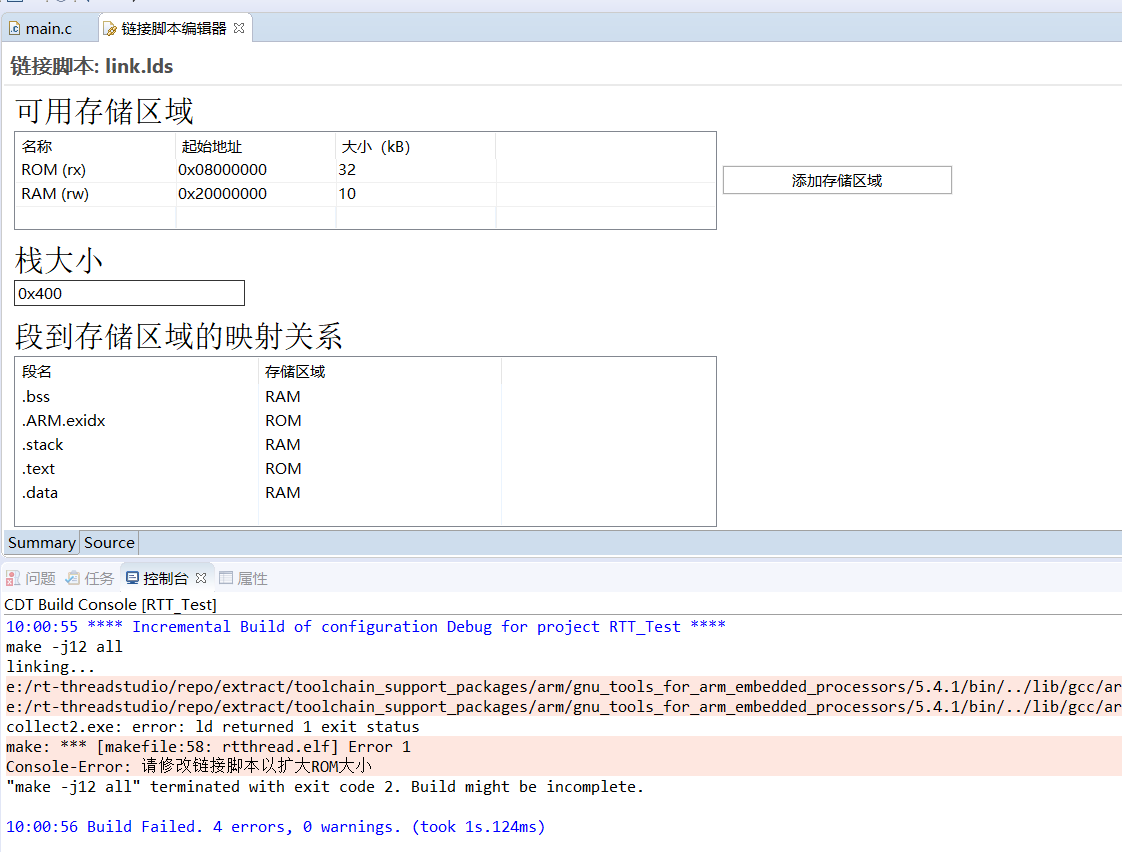
直接编译的时候发现有错误:ROM空间不够
改为64KB保存编译
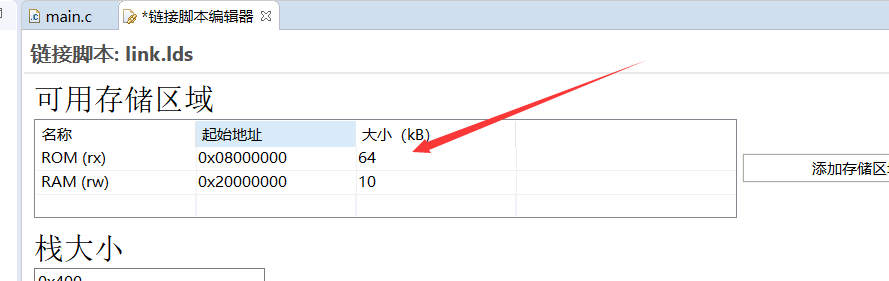
可以看到占用了51KB的ROM(FLASH是一种ROM):(但是STM32F103C6只有32KB的Flash)
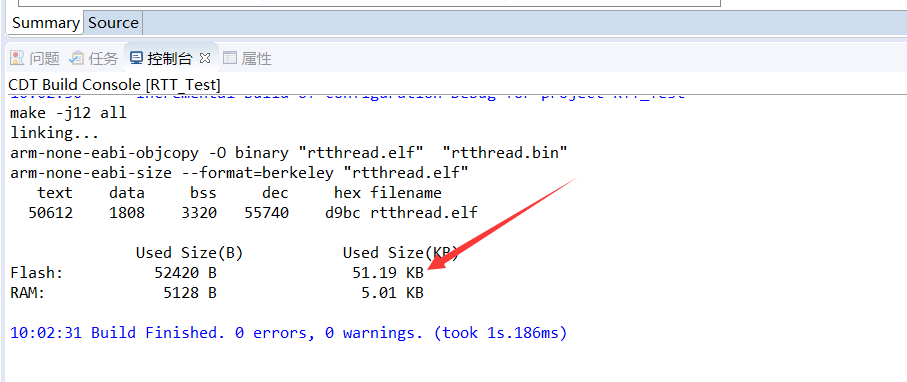
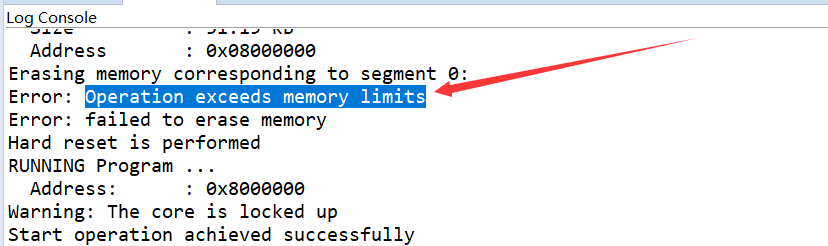
所以下载的时候很明显下载不进去:
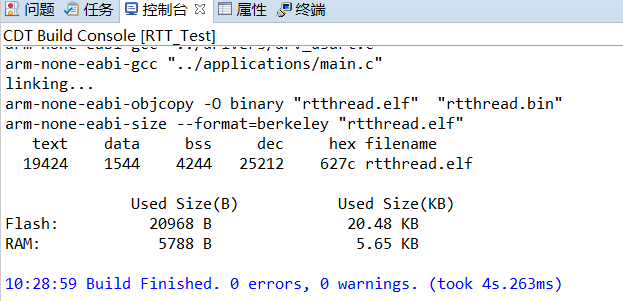
所以之后我直接创建了Nano的工程:

编译后的占用资源就在32KB内了:
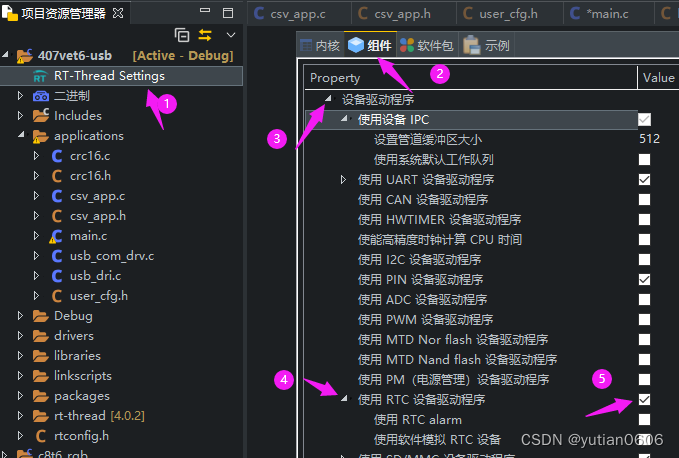
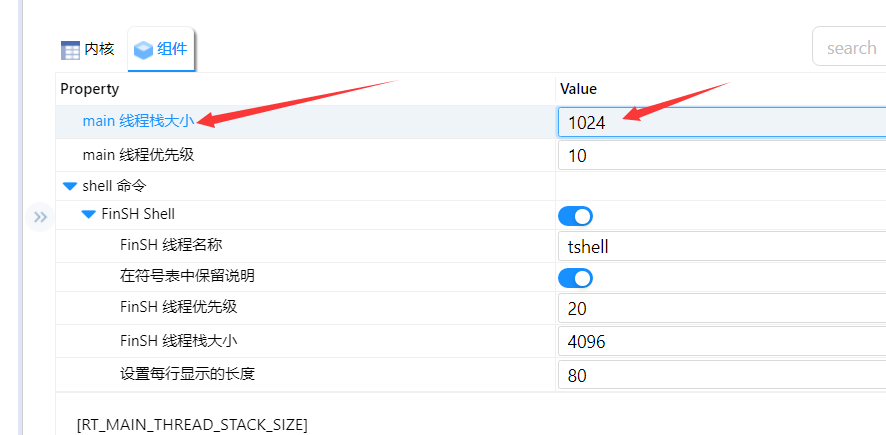
添加FinSH
添加FinSH:
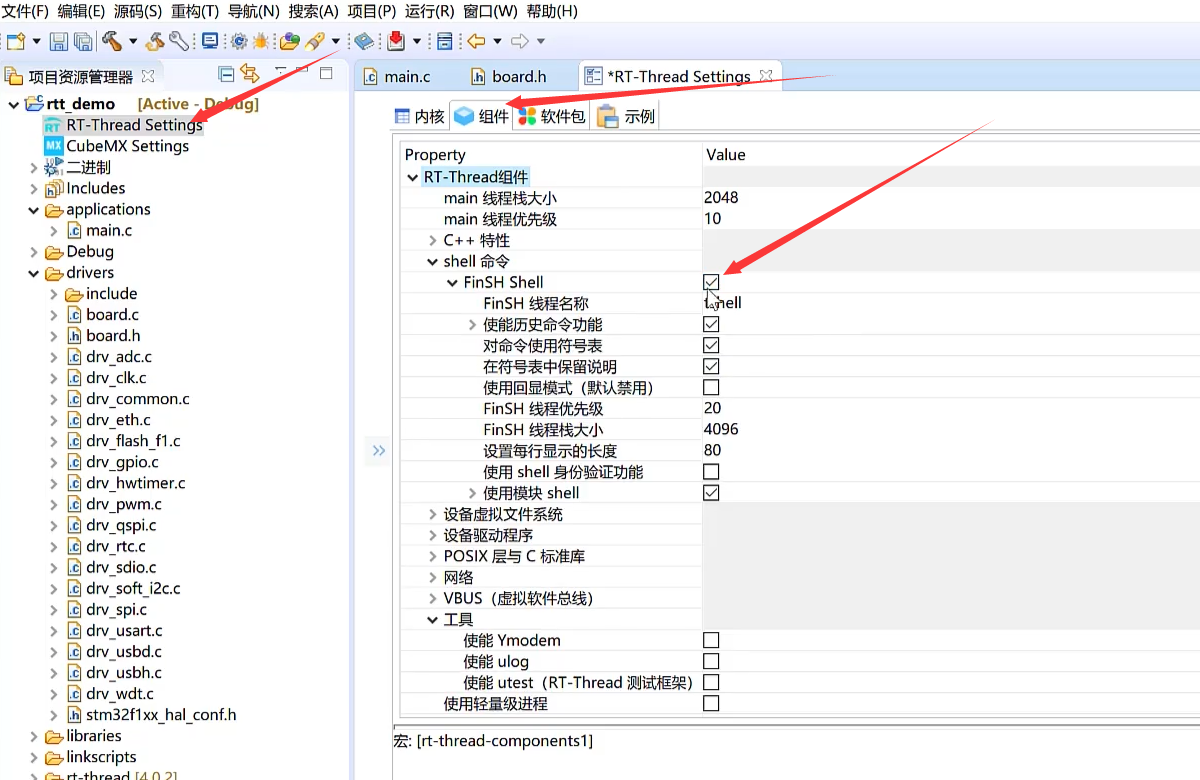
我这里添加后,RAM资源又超了,所以将线程栈大小降低了:(目前不清楚会有什么bug,会不会程序崩溃)
最后下进去确实有效果:看来得重新做一个32的板子了,C6T6不够用。
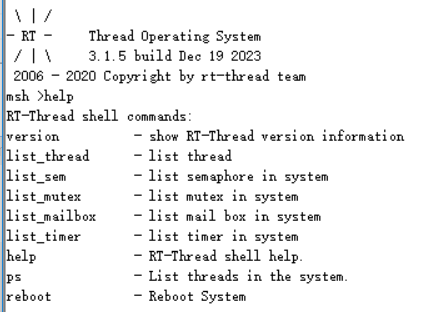
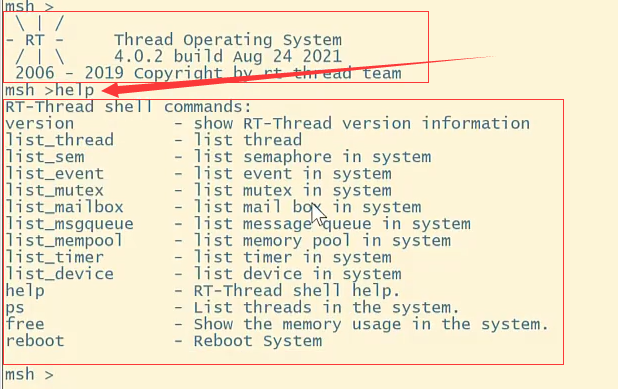
串口命令提示
板子上电复位后:串口会先输出当前RTT版本,之后我们可以通过键入help获取支持哪些命令信息: