在ROS中结合OpenCV使用时,cv::imread() 函数并非ROS本身的API,而是来自OpenCV库的函数,用于读取本地磁盘上的图像文件。
其用法如下:
cv::Mat cv::imread(const string& filename, int flags = IMREAD_COLOR);
参数说明:
filename:字符串类型,表示要读取的图像文件的完整路径和名称。
flags:整型变量,定义了读取图像的方式,可选值包括:
IMREAD_UNCHANGED 或 -1:加载图像,包括alpha通道(如果存在)。
IMREAD_GRAYSCALE 或 0:以灰度模式加载图像。
IMREAD_COLOR 或 1:默认选项,以彩色模式加载图像(如果是彩色图像)。
IMREAD_ANYDEPTH:加载任意深度图像作为单通道图像。
IMREAD_ANYCOLOR:加载任何颜色空间的图像。
可以将上述标志进行组合,例如 IMREAD_GRAYSCALE | IMREAD_ANYDEPTH 将加载一个可能包含高动态范围数据的灰度图像。
返回值:
cv::Mat 类型的对象,代表所读取的图像数据。如果没有成功读取图像,则返回一个空矩阵(即 .empty() 返回 true)。
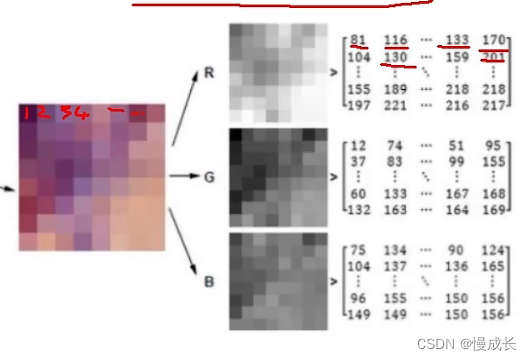
彩色图像使用 OpenCV 加载时是 BGR 模式。
示例代码:
#include <opencv2/opencv.hpp>
#include <ros/ros.h>
int main(int argc, char** argv)
{
ros::init(argc, argv, "image_reader");
ros::NodeHandle nh;
// 读取图像文件
cv::Mat image = cv::imread("/home/user/path/to/image.jpg", cv::IMREAD_COLOR);
if (image.empty())
{
ROS_ERROR("Could not read the image file.");
return -1;
}
// 显示图像
cv::imshow("Image Window", image);
cv::waitKey(0); // 等待用户按键,窗口才会关闭
return 0;
}
在ROS环境下,通常会结合cv_bridge来处理ROS Image消息与OpenCV Mat之间的转换,而不仅仅是读取本地文件。如果是在ROS节点内部操作摄像头获取的图像,那么需要从ROS话题订阅图像数据,并通过cv_bridge的imgmsg_to_cv2()函数将其转换为OpenCV可以处理的cv::Mat格式。
cv::imwrite() 函数同样是来自OpenCV库的函数,用于将图像数据保存到本地磁盘上的文件。可以使用这个函数来保存摄像头捕获的图像或者处理后的图像。使用函数 cv2.imwrite() 来保存一个图像。(首先需要一个文件名,之后才是要保存的图像。)
其用法如下:
cv::imwrite(const string& filename, InputArray img, const std::vector<int>& params = std::vector<int>());
参数说明:
filename:字符串类型,表示要写入图像文件的完整路径和名称,包括扩展名,根据扩展名来确定输出图像的格式。
img:cv::Mat 类型的对象或其他符合 InputArray 类型要求的图像数据结构,这是要保存的图像内容。
params:可选参数,一个整数类型的向量,用于指定编码器特定的参数或选项。可选参数,用于指定图像压缩编码格式和压缩级别。
例如,在写入JPEG格式图像时可以设置压缩质量等。如果不需要特殊设置,则可以不提供此参数,此时默认为一个空的整数向量。
示例代码:
#include <iostream>
#include <opencv2/opencv.hpp>
int main()
{
// 读取图像
cv::Mat img = cv::imread("input.jpg");
if (img.empty())
{
std::cout << "无法读取图像" << std::endl;
return -1;
}
// 保存图像
bool result = cv::imwrite("output.jpg", img);
if (result)
{
std::cout << "图像保存成功" << std::endl;
}
else
{
std::cout << "图像保存失败" << std::endl;
}
return 0;
}
imshow()函数用于在窗口中显示图像。(窗口会自动调整为图像大小。第一个参数是窗口的名字,其次才是需要的图像。)
其用法如下:
void imshow(const String& winname, const Mat& image);
参数说明:
winname:字符串类型,表示要显示图像的窗口名称。如果该窗口尚不存在,则会创建一个新的窗口。
image:要显示的图像,通常是一个Mat对象。
示例代码:
#include <opencv2/opencv.hpp>
#include <iostream>
using namespace cv;
using namespace std;
int main()
{
// 读取图像
Mat image = imread("example.jpg");
// 检查图像是否正确读取
if (image.empty())
{
cout << "无法读取图像" << endl;
return -1;
}
// 创建一个名为"Example Image"的窗口
namedWindow("Example Image", WINDOW_AUTOSIZE);
// 在窗口中显示图像
imshow("Example Image", image);
// 等待按键,然后关闭窗口
waitKey(0);
destroyAllWindows();
return 0;
}
在这个示例中,首先包含了必要的头文件,然后定义了一个名为main的函数。在main函数中,使用imread函数读取了一张名为example.jpg的图像,并将其存储在Mat对象image中。
然后,使用namedWindow函数创建一个名为"Example Image"的窗口,并设置窗口大小自动调整。最后,使用imshow函数在窗口中显示图像,并使用waitKey(0)等待用户按下任意键,然后使用destroyAllWindows()关闭所有打开的窗口。
补充:cv2.waitKey() 是一个键盘绑定函数。需要指出的是它的时间尺度是毫秒级。函数等待特定的几毫秒,看是否有键盘输入。特定的几毫秒之内,如果按下任意键,这个函数会返回按键的 ASCII 码值,程序将会继续运行。如果没有键盘输入,返回值为 -1,如果我们设置这个函数的参数为 0,那它将会无限期的等待键盘输入。
cv2.destroyAllWindows() 可以轻易删除任何建立的窗口。如果想删除特定的窗口可以使用 cv2.destroyWindow(),在括号内输入想删除的窗口名。