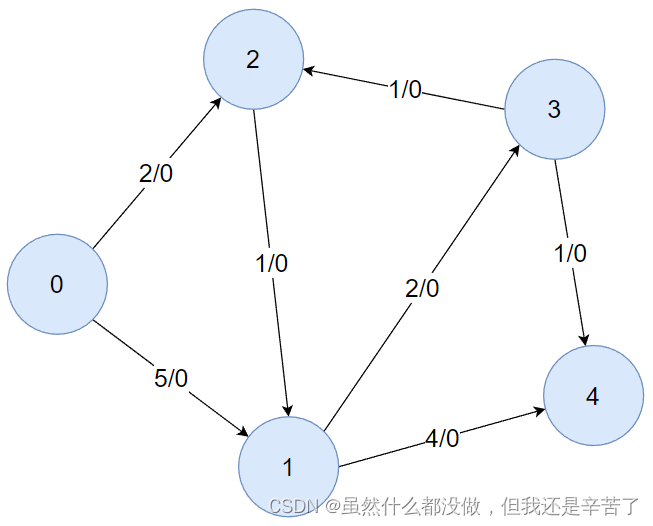
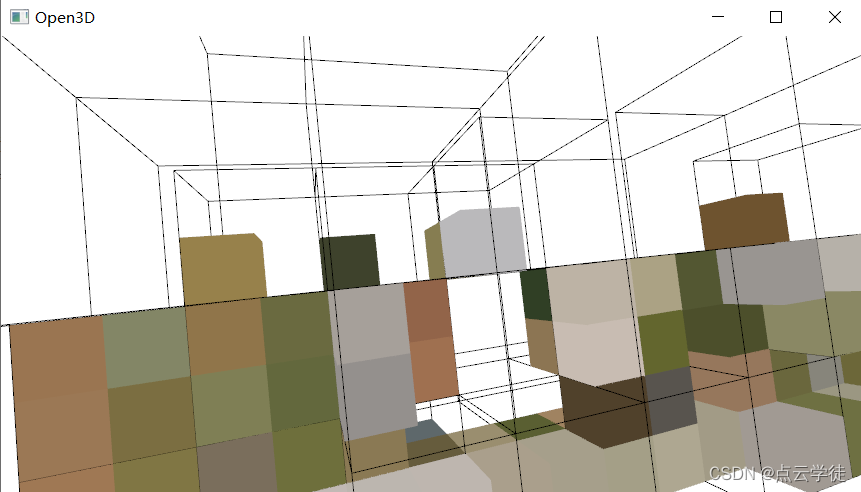
上一章介绍从点云构建八叉树,对点云所在体素进行了可视化显示,这里可以对体素构建八叉树,可视化显示八叉树的具体划分结构。
代码如下(示例):
import open3d as o3d import numpy as np # 构建点云对象 pcd = o3d.io.read_point_cloud("D:\\shuju\\简



















![[易语言]使用易语言部署工业级人脸检测模型](https://img-blog.csdnimg.cn/direct/62bcb33d728a492e9a2d7bcb53099ed5.jpeg)