×
亲?你还没登陆呢 !
立即登录
×
搜索一下可能来得更快
搜索
{{ date }}
{{ time }}
博客
开发
推荐
xml
txt
html
标签
登录
博客
开发
推荐
NACHI机器人虚拟示教器报I2101异常
2024-01-08 06:54:02
开发
55
前言
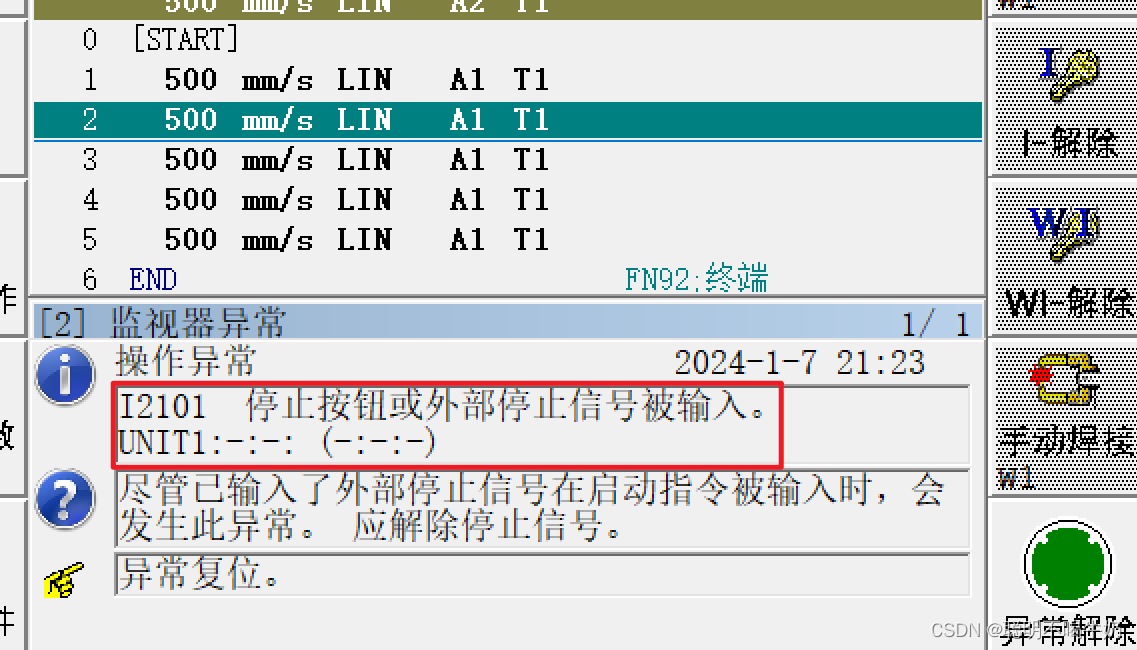
机器人示教器报:
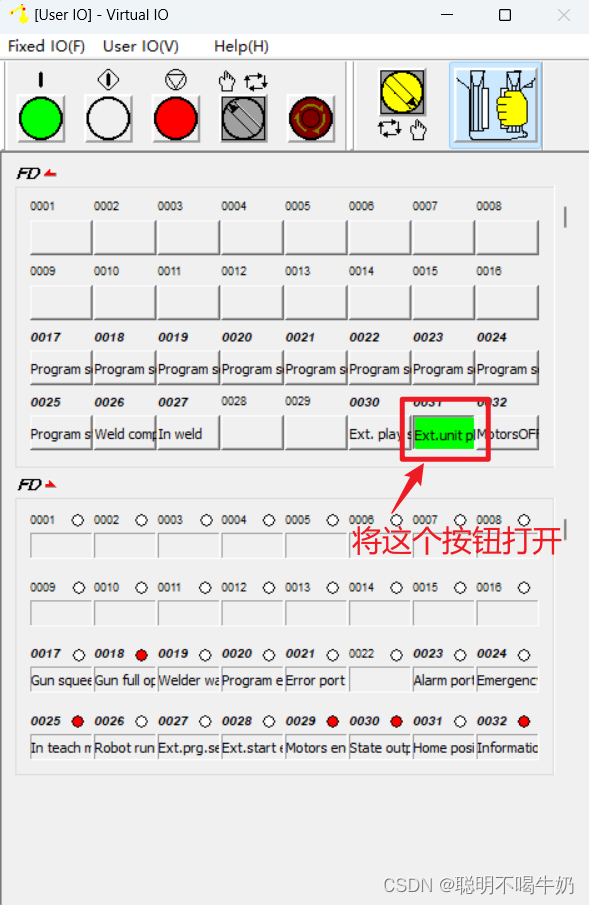
I2101 异常停止按钮或外部停止信号被输入
无法再示教模式下进行程序的运行!
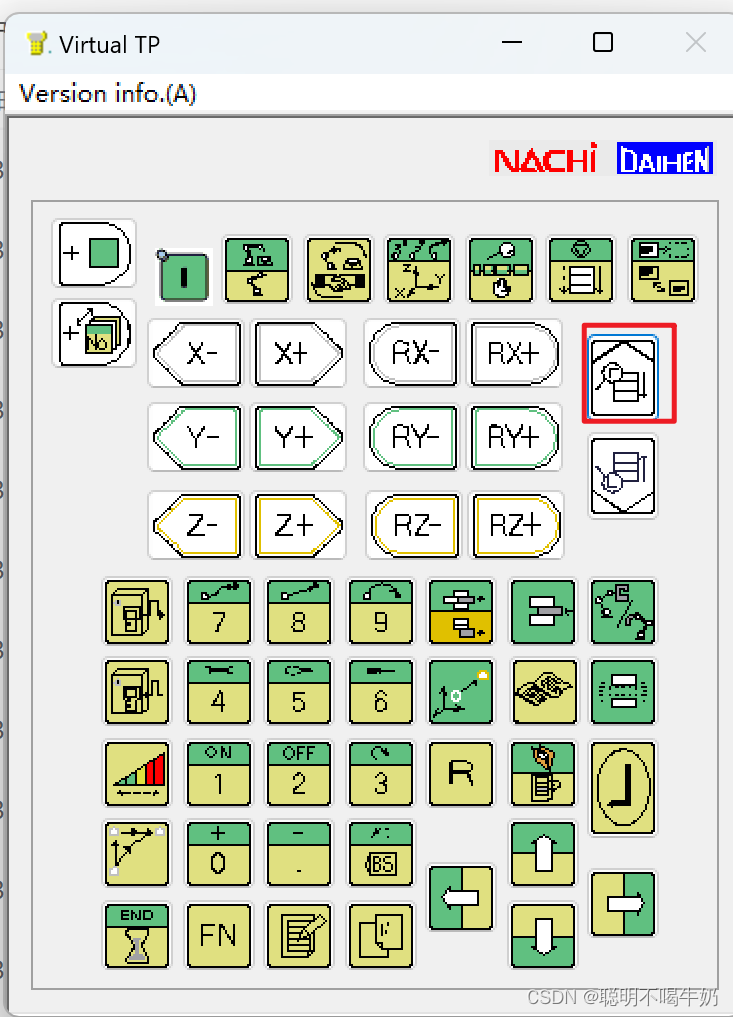
解决方法
结果
最后测试可以正常的运行程序
原文地址:https://blog.csdn.net/Ppphill_C/article/details/135445246 本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。 本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若转载,请注明出处:https://www.suanlizi.com/kf/1744130297294884864.html 如若内容造成侵权/违法违规/事实不符,请联系《酸梨子》网邮箱:1419361763@qq.com进行投诉反馈,一经查实,立即删除!
阅读全部
相关推荐
NACHI
机器人
虚拟
示
教
器
报
I
2101
异常
2024-01-08 06:54:02
56
阅读
NACHI
机器人
模拟
示
教
器
如何切换中文
2024-01-08 06:54:02
55
阅读
FANUC
机器人
示
教
器
的菜单变成了图标,如何改成列表的形式?
2024-01-08 06:54:02
43
阅读
FANUC
机器人
开机时无法进入系统,
示
教
器
黑屏故障处理总结
2024-01-08 06:54:02
46
阅读
FANUC
机器人
如何清除
示
教
器
右上角的白色感叹号?
2024-01-08 06:54:02
53
阅读
库卡
机器人
示
教
器
KPC2 00107-264 KPC200.107-264
2024-01-08 06:54:02
25
阅读
维修ABB
示
教
器
主板DSQC679 3HAC 033624-001 /R
机器人
液晶显示屏
2024-01-08 06:54:02
28
阅读
BL
201
分布式
I
/O耦合
器
连接Profinet网络
2024-01-08 06:54:02
32
阅读
Profinet模块化分布式
I
/O系统BL
201
耦合
器
2024-01-08 06:54:02
32
阅读
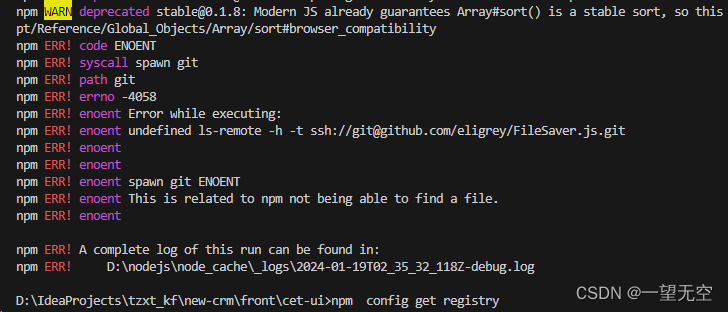
vue项目执行依赖安装(npm
i
或npm install )
报
ls-remote -h -t
异常
2024-01-08 06:54:02
63
阅读
最近更新
题解 - 序列
2024-01-08 06:54:02
122
阅读
CST热仿真案例——电动车直流快充Cable热仿真
2024-01-08 06:54:02
109
阅读
docker php8.1+nginx base 镜像 dockerfile 配置
2024-01-08 06:54:02
98
阅读
Could not load dynamic library ‘cudart64_100.dll‘
2024-01-08 06:54:02
106
阅读
NoSQL之Redis非关系型数据库
2024-01-08 06:54:02
108
阅读
2024.7.22 作业
2024-01-08 06:54:02
106
阅读
GDB调试正在运行的程序
2024-01-08 06:54:02
87
阅读
昇思25天学习打卡营第18天| DCGAN生成漫画头像
2024-01-08 06:54:02
90
阅读
在Django里面运行非项目文件
2024-01-08 06:54:02
87
阅读
SSD基本架构与工作原理
2024-01-08 06:54:02
94
阅读
在誉天学习完HCIE就业吗?
2024-01-08 06:54:02
98
阅读
【合同专题】合同终止协议书、项目合作协议、交底纪要、管理台账
2024-01-08 06:54:02
90
阅读
驾驭云原生日志洪流:高效分析与管理的策略集
2024-01-08 06:54:02
92
阅读
go 协程池的实现
2024-01-08 06:54:02
93
阅读
Shell脚本循环语句与函数
2024-01-08 06:54:02
96
阅读
连锁店收银系统源码(收银称重pos+聚合支付+ERP进销存+营销+会员管理)
2024-01-08 06:54:02
98
阅读
TIA博途V19无法勾选来自远程对象的PUT/GET访问的解决办法
2024-01-08 06:54:02
90
阅读
四大引用——强软弱虚
2024-01-08 06:54:02
92
阅读
Python语言-面向对象
2024-01-08 06:54:02
96
阅读
如何分清楚常见的 Git 分支管理策略Git Flow、GitHub Flow 和 GitLab Flow
2024-01-08 06:54:02
91
阅读
网站安全-CDN篇
2024-01-08 06:54:02
93
阅读
热门阅读
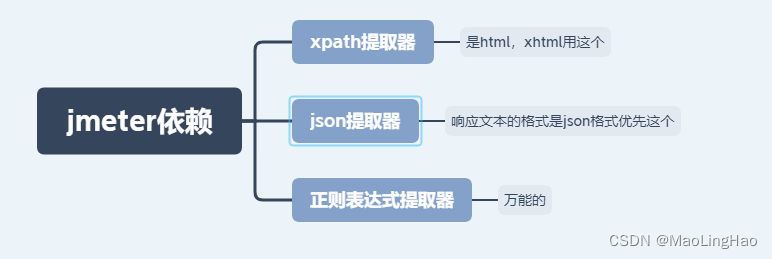
jmeter关联依赖---三种
2024-01-08 06:54:02
61
阅读
Hive SQL / SQL
2024-01-08 06:54:02
46
阅读
Hadoop集群三节点搭建(一)
2024-01-08 06:54:02
62
阅读
【深度学习】因果推断与机器学习的高级实践 | 数学建模
2024-01-08 06:54:02
62
阅读
05 Ciso模拟器连接腾讯云物联网开发平台
2024-01-08 06:54:02
56
阅读
力扣labuladong一刷day54天前缀树
2024-01-08 06:54:02
42
阅读
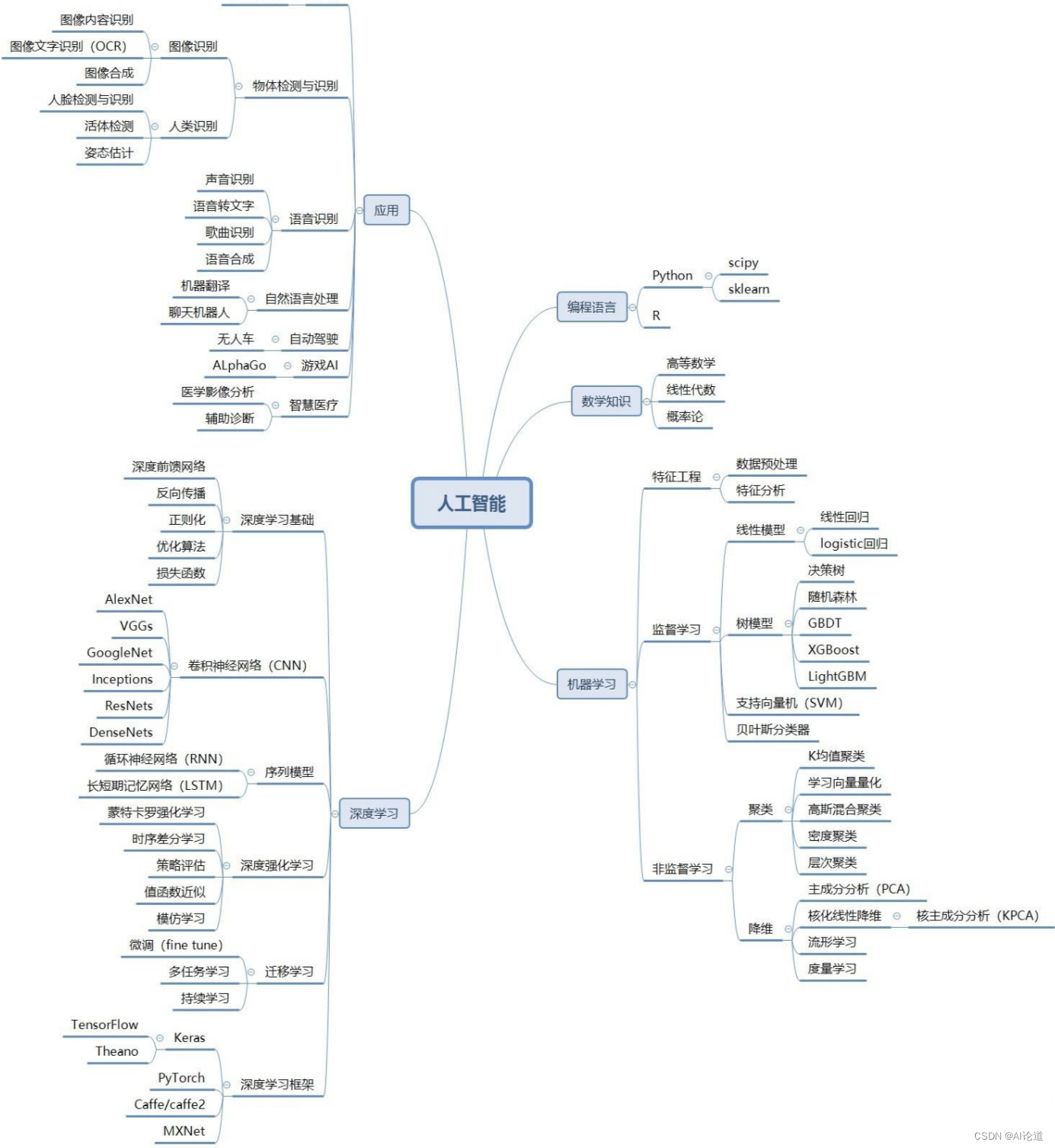
AI人工智能学习路线图
2024-01-08 06:54:02
62
阅读
opencv期末练习题(2)附带解析
2024-01-08 06:54:02
53
阅读
Python综合数据分析_根据订单求RFM值
2024-01-08 06:54:02
62
阅读
修复 OpenCV 依赖错误的小工具:OpenCV Fixer
2024-01-08 06:54:02
55
阅读
【设计模式】适配器模式
2024-01-08 06:54:02
69
阅读
Priors in Deep Image Restoration and Enhancement: A Survey
2024-01-08 06:54:02
38
阅读
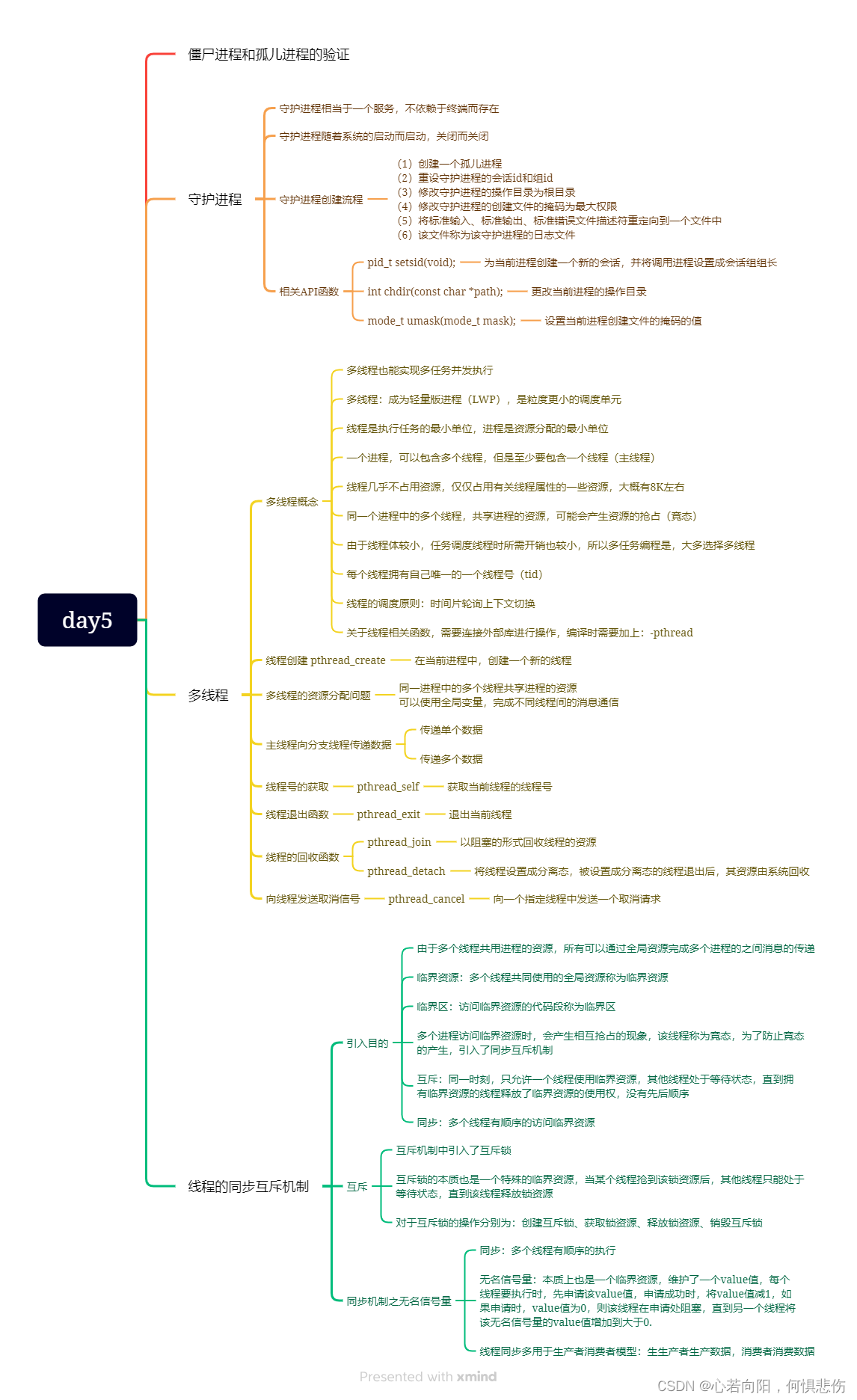
IO进程线程day
2024-01-08 06:54:02
62
阅读
Visual Studio Code 常用快捷键
2024-01-08 06:54:02
54
阅读
FineBI实战项目一(3):Kettle实现ETL到数据仓库
2024-01-08 06:54:02
60
阅读
FineBI实战项目一(4):指标分析之每日订单总额/总笔数
2024-01-08 06:54:02
57
阅读
搭建React开发环境-webpack实现
2024-01-08 06:54:02
45
阅读
C++入门教程,C++基础教程(第一部分:从C到C++)七
2024-01-08 06:54:02
56
阅读
电脑丢失dll文件怎么办,dll修复工具可一键修复dll问题
2024-01-08 06:54:02
60
阅读
【基础工具篇使用】VScode 远程 Ubuntu 系统 进行使用
2024-01-08 06:54:02
54
阅读
Go语言中的init函数的执行时机
2024-01-08 06:54:02
48
阅读
最新ChatGPT网站系统源码+详细搭建部署教程+Midjourney绘画AI绘画
2024-01-08 06:54:02
64
阅读
【图文详解】Android Studio(新版本) 配置OpenCV库,解决出现的各种问题
2024-01-08 06:54:02
61
阅读
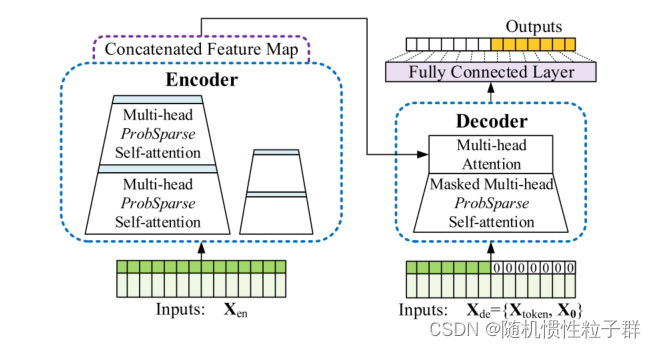
Informer:用于长序列时间序列预测的高效Transformer模型
2024-01-08 06:54:02
48
阅读
SLAM ORB-SLAM2(16)奇异值分解
2024-01-08 06:54:02
51
阅读
HEVC 视频扩展安装包,WIN10上看苹果的照片格式
2024-01-08 06:54:02
58
阅读
数据结构——堆
2024-01-08 06:54:02
60
阅读
<设计模式修炼>模板方法模式的使用场景和注意事项学习
2024-01-08 06:54:02
55
阅读
设计模式-模板方法模式
2024-01-08 06:54:02
63
阅读
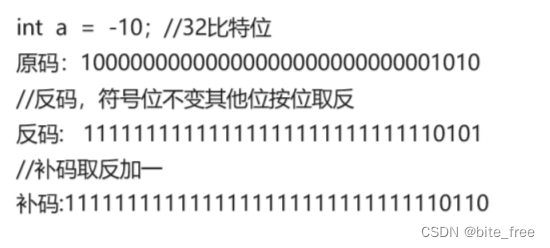
C语言数据在内存中的存储
2024-01-08 06:54:02
51
阅读