无人机低空视角:针对人群密集场景的检测、跟踪和计数技术
DroneCrowd
Paper
简介

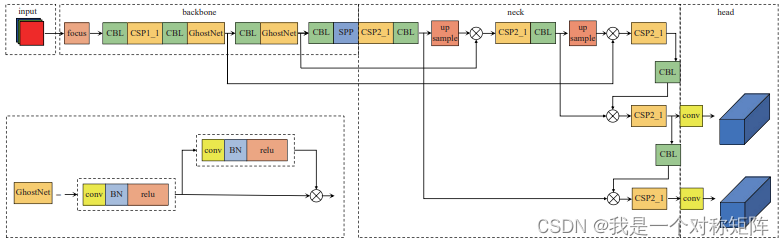
本文提出了一种时空多尺度注意力网络(STANet),用于解决由无人机捕捉的视频剪辑中的密集人群的密度图估计、定位和跟踪问题,涵盖了各种人群密度、视角和飞行高度。我们的STANet方法通过聚合顺序帧中的多尺度特征图来利用时间一致性,然后同时预测密度图、定位目标并在人群中关联它们。我们设计了一个由密度图损失、定位损失和关联损失三个项组成的多任务损失函数,并采用逐步应用注意力模块的粗到细过程,以强化网络对判别性时空特征的利用,以提高性能。整个网络以端到端的方式进行训练。在情景中使用非最大抑制和最小代价流框架生成目标的轨迹。由于现有的人群计数数据集主要关注于静态摄像机中的人群计数,而不是无人机上的密度图估计、计数和跟踪,因此我们收集了一个新的大规模基于无人机的数据集,称为DroneCrowd,包括112个视频剪辑,共33600个高分辨率帧(即1920x1080),捕捉了70个不同情景。通过大量的努力,我们的数据集提供了20800个人的轨迹,480万个头部标注以及序列中的多个视频级属性。我们在两个具有挑战性的公共数据集(上海科技和UCF-QNRF)以及我们的DroneCrowd上进行了广泛的实验证明STANet在性能上优于现有技术水平。
数据集
ECCV2020挑战
VisDrone 2020人群计数挑战要求参与算法对每个帧中的人数进行计数。挑战将提供112个具有挑战性的序列,包括82个用于训练的视频序列(总共2420帧)和30个用于测试的序列(总共900帧),可在下载页面上获得。我们在每个视频帧中用点手动标注人物。
DroneCrowd(1.03 GB):百度云(提取码:h0j8)| 谷歌云
DroneCrowd(完整版)
这个完整版本包括112个视频剪辑,共33600个高分辨率帧(即1920x1080),捕捉了70个不同的场景。通过大量的努力,我们的数据集提供了20800个人的轨迹,480万个头部标注以及序列中的多个视频级属性。