项目背景和步骤
车道检测是自动驾驶领域不可或缺的一环
具体步骤如下:
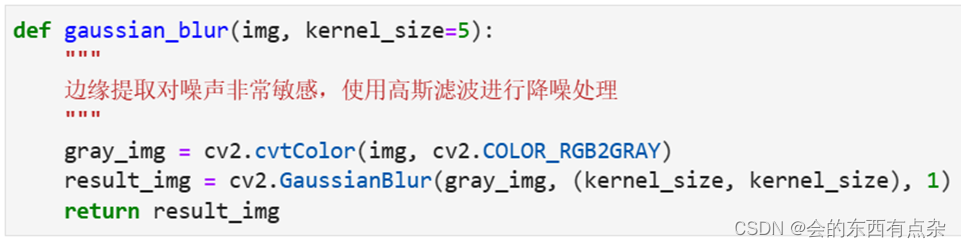
一、将图像灰度化,并进行适度的高斯滤波,剔除干扰
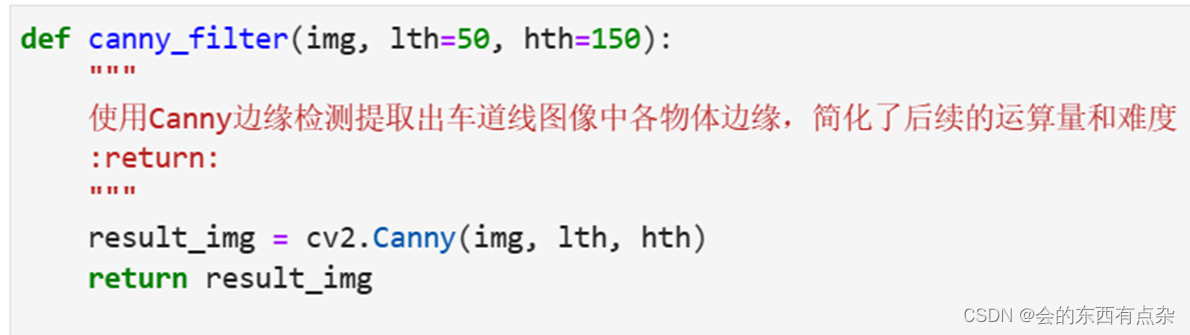
二、利用Canny边缘检测,检测出车道和其它物体的边缘
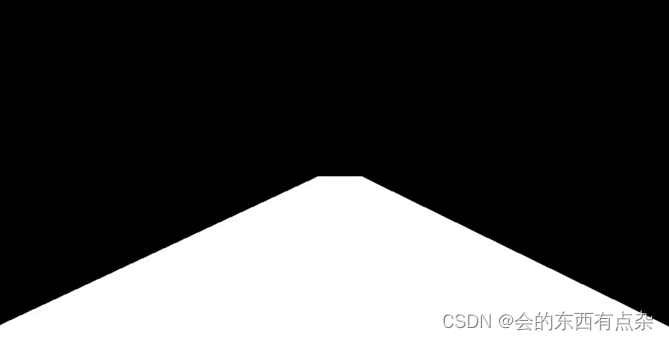
三、使用ROI区域截取,截取需要的部分,再次剔除干扰
四、利用霍夫直线检测,检测出图像中直线部分
五、通过计算,得出车道的具体位置
步骤一、车道图像预处理
图像的预处理主要分为两个部分:灰度化和降噪。通过图像的灰度化,可以大大减小计算量和不必要的干扰由于边缘提取对噪声非常敏感,所以还要对图像进行适当的降噪处理可以使用高斯滤波,去除不必要的噪点 。

步骤二、车道边缘检测

使用ROI截取来截取图片中所需要的部分内容


步骤三、车道霍夫直线变换变成直线
使用霍夫直线变换,将车道图像转换成直线图像,以便于后续的计算。

步骤四、车道线计算
车道计算步骤:
1、根据斜率区分开左右车道;
2、滤掉一些异常数据;
3、利用最小二乘法拟合左右车道线;
4、直接使用np.polyfit()进行最小二乘法拟合 ;

采用绿色填充车道区域,更便于实际观察使用
将draw_lanes(hough_lines_img, hough_lines, draw_type='line')中最后的参数修改为‘area’。
使用cv.fillPoly()函数来绘制车道区域
格式:cv.fillPoly(img,pts,color[,lineType[,shift[,offset]]])


![[python]<span style='color:red;'>基于</span><span style='color:red;'>opencv</span>实现<span style='color:red;'>的</span><span style='color:red;'>车道</span>线<span style='color:red;'>检测</span>](https://img-blog.csdnimg.cn/direct/8ec3bf45b4f04ab8b7fedc054c530b39.jpeg)