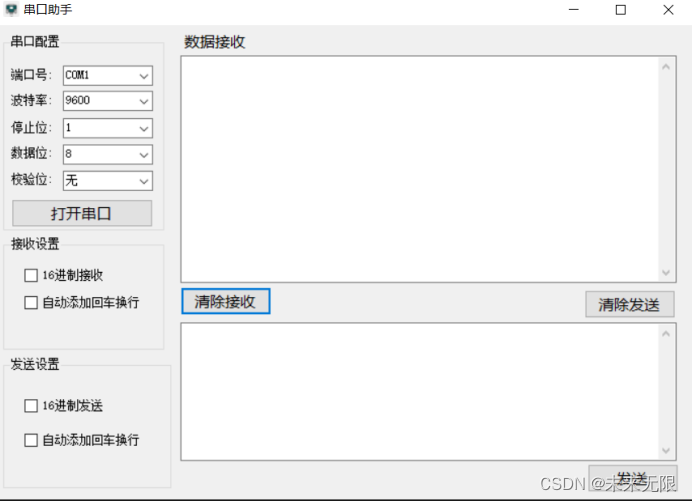
完成:从终端输入选项,完成点灯关灯,打开风扇关闭风扇等操作
#include "gpio.h"
int main()
{
char a;
//char buf[128];
uart4_config();
gpio_config();
while(1)
{
//接收一个字符数据
a = getchar();
//发送接收的字符
putchar(a);
switch(a)
{
case '1':
{
light1_on();
}break;
case '2':
{
light2_on();
}break;
case '3':
{
light3_on();
}break;
case '4':
{
fans_on();
}break;
case '0':
{
light_off();
}break;
}
}
return 0;
}
#include "gpio.h"
void uart4_config()
{
//使能GPIOB\GPIOG\UART4外设时钟
RCC->MP_AHB4ENSETR |= (0x1<<6); //gpioB
RCC->MP_AHB4ENSETR |= (0x1<<1); //gpioG
RCC->MP_APB4ENSETR |= (0x1<<16); //uart4
//设置PB2、PG11用于UART4管脚复用
GPIOB->MODER &=~(0x3<<4);
GPIOB->MODER |= (0x2<<4);
GPIOB->AFRL &=~(0xf<<8);
GPIOB->AFRL |= (0x8<<8);
GPIOG->MODER &= ~(0x3<<22);
GPIOG->MODER |= (0x2<<22);
GPIOG->AFRH &=~(0xf<<12);
GPIOG->AFRH |= (0x6<<12);
//设置串口禁用
USART4->CR1 &= ~(0x1);
//设置数据位宽为8位
USART4->CR1 &=(~(0x1<<12));
USART4->CR1 &=(~(0x1<<28));
//设置无奇偶校验位
USART4->CR1 &=(~(0x1<<10));
//设置16倍过采样
USART4->CR1 &=(~(0x1<<15));
//设置1位停止位
USART4->CR2 &=(~(0x3<<12));
//设置不分频
USART4->PRESC &= (~0xf);
//设置波特率为115200
USART4->BRR = 0x22B;
//使能发送器
USART4->CR1 |= (0x1<<3);
//使能接收器
USART4->CR1 |= (0x1<<2);
//使能串口
USART4->CR1 |= (0x1);
}
void putchar(char a)
{
while(!(USART4->ISR &(0x1<<7)));
USART4->TDR=a;
while(!(USART4->ISR &(0x1<<6)));
}
char getchar()
{
char a;
while(!(USART4->ISR &(0x1<<5)));
a=USART4->RDR;
return a;
}
void puts(char *s)
{
while(*s)
{
putchar(*s);
s++;
}
putchar('\r');
putchar('\n');
}
void gets(char *s)
{
while(1)
{
*s = getchar();
putchar(*s);
if(*s == 'r')
break;
s++;
}
*s = '\0';
putchar('\n');
}
void gpio_config()
{
RCC_GPIO |=(0x3<<4);
GPIOE->MODER &=(~(0x3<<20));
GPIOE->MODER |=(0x1<<20);
GPIOE->OTYPER &=(~(0x1<<10));
GPIOE->OSPEEDR &=(~(0x3<<20));
GPIOE->PUPDR &=(~(0x3<<20));
GPIOF->MODER &=(~(0x3<<20));
GPIOF->MODER |=(0x1<<20);
GPIOF->OTYPER &=(~(0x1<<10));
GPIOF->OSPEEDR &=(~(0x3<<20));
GPIOF->PUPDR &=(~(0x3<<20));
GPIOE->MODER &=(~(0x3<<16));
GPIOE->MODER |=(0x1<<16);
GPIOE->OTYPER &=(~(0x1<<8));
GPIOE->OSPEEDR &=(~(0x3<<16));
GPIOE->PUPDR &=(~(0x3<<16));
GPIOE->MODER &=(~(0x3<<18));
GPIOE->MODER |=(0x1<<18);
GPIOE->OTYPER &=(~(0x1<<9));
GPIOE->OSPEEDR &=(~(0x3<<18));
GPIOE->PUPDR &=(~(0x3<<18));
}
void light1_on()
{
GPIOE->ODR |= (0x1<<10);
}
void light2_on()
{
GPIOF->ODR |= (0x1<<10);
}
void light3_on()
{
GPIOE->ODR |= (0x1<<8);
}
void fans_on()
{
GPIOE->ODR |= (0x1<<9);
}
void light_off()
{
GPIOE->ODR &= (~(0x1<<10));
GPIOF->ODR &= (~(0x1<<10));
GPIOE->ODR &= (~(0x1<<8));
GPIOE->ODR &= (~(0x1<<9));
}
#include "gpio.h"
void uart4_config()
{
//使能GPIOB\GPIOG\UART4外设时钟
RCC->MP_AHB4ENSETR |= (0x1<<6); //gpioB
RCC->MP_AHB4ENSETR |= (0x1<<1); //gpioG
RCC->MP_APB4ENSETR |= (0x1<<16); //uart4
//设置PB2、PG11用于UART4管脚复用
GPIOB->MODER &=~(0x3<<4);
GPIOB->MODER |= (0x2<<4);
GPIOB->AFRL &=~(0xf<<8);
GPIOB->AFRL |= (0x8<<8);
GPIOG->MODER &= ~(0x3<<22);
GPIOG->MODER |= (0x2<<22);
GPIOG->AFRH &=~(0xf<<12);
GPIOG->AFRH |= (0x6<<12);
//设置串口禁用
USART4->CR1 &= ~(0x1);
//设置数据位宽为8位
USART4->CR1 &=(~(0x1<<12));
USART4->CR1 &=(~(0x1<<28));
//设置无奇偶校验位
USART4->CR1 &=(~(0x1<<10));
//设置16倍过采样
USART4->CR1 &=(~(0x1<<15));
//设置1位停止位
USART4->CR2 &=(~(0x3<<12));
//设置不分频
USART4->PRESC &= (~0xf);
//设置波特率为115200
USART4->BRR = 0x22B;
//使能发送器
USART4->CR1 |= (0x1<<3);
//使能接收器
USART4->CR1 |= (0x1<<2);
//使能串口
USART4->CR1 |= (0x1);
}
void putchar(char a)
{
while(!(USART4->ISR &(0x1<<7)));
USART4->TDR=a;
while(!(USART4->ISR &(0x1<<6)));
}
char getchar()
{
char a;
while(!(USART4->ISR &(0x1<<5)));
a=USART4->RDR;
return a;
}
void gpio_config()
{
RCC_GPIO |=(0x3<<4);
GPIOE->MODER &=(~(0x3<<20));
GPIOE->MODER |=(0x1<<20);
GPIOE->OTYPER &=(~(0x1<<10));
GPIOE->OSPEEDR &=(~(0x3<<20));
GPIOE->PUPDR &=(~(0x3<<20));
GPIOF->MODER &=(~(0x3<<20));
GPIOF->MODER |=(0x1<<20);
GPIOF->OTYPER &=(~(0x1<<10));
GPIOF->OSPEEDR &=(~(0x3<<20));
GPIOF->PUPDR &=(~(0x3<<20));
GPIOE->MODER &=(~(0x3<<16));
GPIOE->MODER |=(0x1<<16);
GPIOE->OTYPER &=(~(0x1<<8));
GPIOE->OSPEEDR &=(~(0x3<<16));
GPIOE->PUPDR &=(~(0x3<<16));
GPIOE->MODER &=(~(0x3<<18));
GPIOE->MODER |=(0x1<<18);
GPIOE->OTYPER &=(~(0x1<<9));
GPIOE->OSPEEDR &=(~(0x3<<18));
GPIOE->PUPDR &=(~(0x3<<18));
}
void light1_on()
{
GPIOE->ODR |= (0x1<<10);
}
void light2_on()
{
GPIOF->ODR |= (0x1<<10);
}
void light3_on()
{
GPIOE->ODR |= (0x1<<8);
}
void fans_on()
{
GPIOE->ODR |= (0x1<<9);
}
void light_off()
{
GPIOE->ODR &= (~(0x1<<10));
GPIOF->ODR &= (~(0x1<<10));
GPIOE->ODR &= (~(0x1<<8));
GPIOE->ODR &= (~(0x1<<9));
}