系列文章目录
前言
一、简介
四元数是一种四元超复数,用于三维旋转和定向。
四元数的表示形式为 a+bi+cj+dk,其中 a、b、c 和 d 为实数,i、j 和 k 为基元,满足等式:i2 = j2 = k2 = ijk =-1。
四元数集用 H 表示,定义在实数的四维向量空间 R4 中。H 中的每个元素都有一个基于基元素 i、j 和 k 线性组合的唯一表示。
三维空间中的所有旋转都可以用旋转轴和围绕该轴的角度来描述。与旋转矩阵相比,四元数的优势在于旋转轴和旋转角度易于解释。例如,考虑 R3 中的一个点。要旋转该点,需要定义一个旋转轴和一个旋转角度。
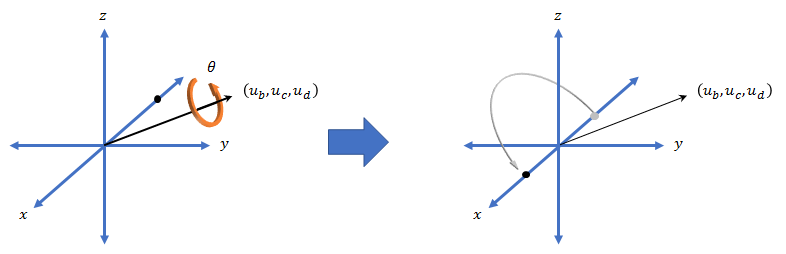
旋转的四元数表示可表示为 ,其中 θ 是旋转角度,[ub、uc 和 ud] 是旋转轴。) ,其中 θ 是旋转角度,[ub、uc 和 ud] 是旋转轴。
二、MATLAB 用法
quat = quaternion()
quat = quaternion(A,B,C,D)
quat = quaternion(matrix)
quat = quaternion(RV, "rotvec")
quat = quaternion(RV, "rotvecd")
quat = quaternion(RM, "rotmat",PF)
quat = quaternion(E, "euler",RS,PF)
quat = quaternion(E, "eulerd",RS,PF)
quat = quaternion(transformation)
quat = quaternion(rotation)三、四元数的优点
1.非奇异表达(和例如欧拉角之类的表示相比)
2.比矩阵更紧凑(更快速)
3.单位四元数的对可以表示四维空间中的一个转动。






















![Hadoop(2):常见的MapReduce[在Ubuntu中运行!]](https://img-blog.csdnimg.cn/direct/634bd4d90e294429a091fc7da005c308.png)