KUKA机器人系统中如何实现将某个点位整体赋值给另一个点位呢?
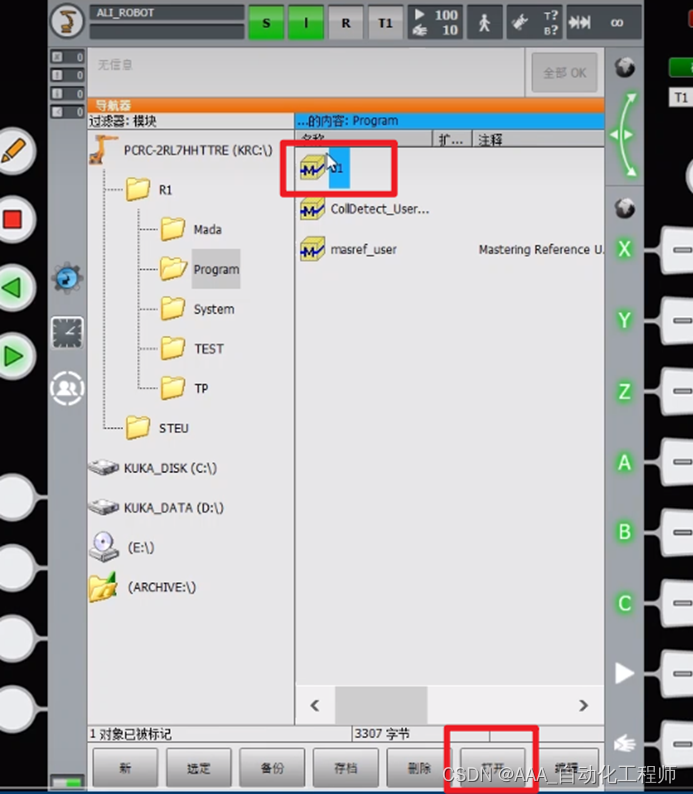
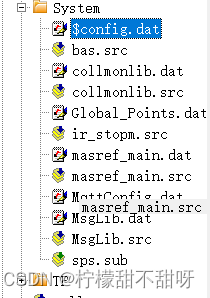
如下图所示,选中某个程序,然后点击下方的打开,
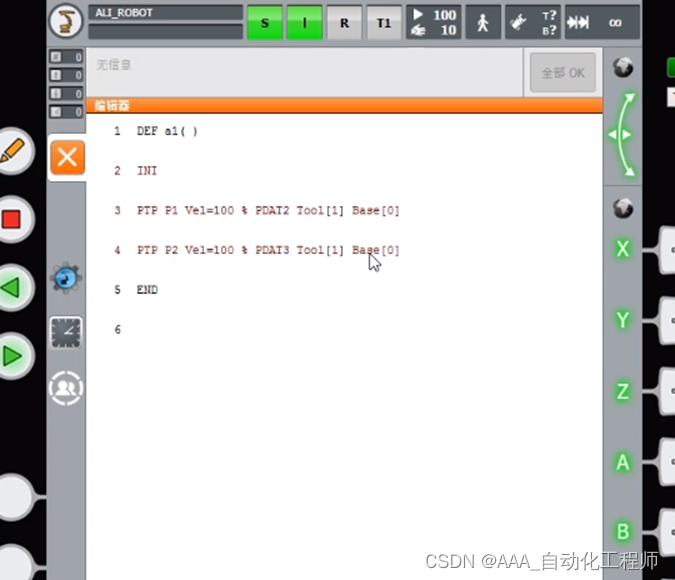
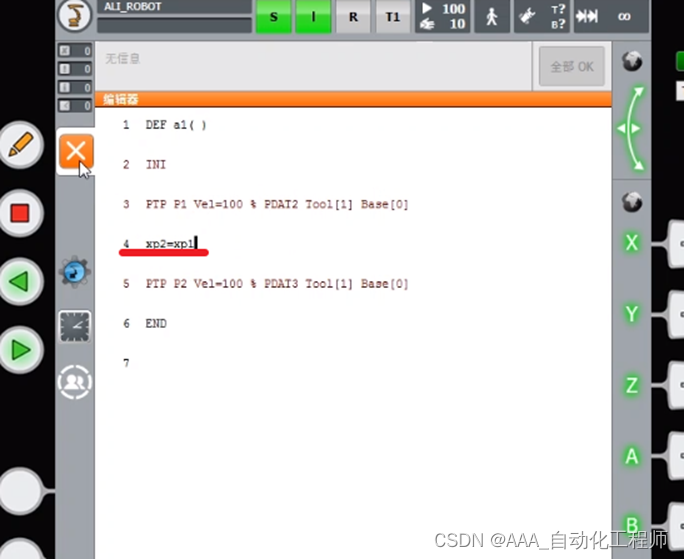
如下图所示,进入程序后,这里有P1和P2两个点位,如果要实现让P2的点位和P1的点位完全相同,除了通过示教器示教的方法,这里再和大家分享直接赋值的方法,
如下图所示,在P1和P2之间,编写语句xp2=xp1,即可实现将P1的坐标点整体赋值给P2,
编写完成后,点击左上角的叉号,系统提示是否保存,确认无误的话点击是,























![[Linux] LAMP架构](https://img-blog.csdnimg.cn/direct/5f1b73e62992469ab3a73e53ab3f9dad.png)