文章目录
前言
本页详细介绍了低成本模拟水下声纳(又称"探鱼器")和数字转换器的设置,数字转换器可将模拟读数转换成 NMEA 0183,供 ardupilot 读取。这种设置可以测量船下的水深。所述传感器的最大探测距离为 300m,波束宽度为 22 度。
这些说明由 OlavA 在这篇 ardupilot.org 博文的底部提供(OlavA at the bottom of this ardupilot.org blog post)。

!Note
Rover-3.4 添加了对该传感器的支持。
1 推荐硬件
Lowrance HST-WSBL 83/200 kHz 底座安装传感器(Lowrance HST-WSBL 83/200 kHz Transom Mount Transducer)可在包括亚马逊网站(amazon.com)在内的许多零售商处购买。其他传感器也可以使用。
DST-2 200kHz 数字转换器(DST-2 200kHz digitizer)可从 Navstore.com 等许多零售商处(many retailers)购买(手册在此)(manuals here)。
2 连接和配置
下图显示的是 airmar 模拟传感器的引脚输出,但与 Lowrance HST-WSBL 的引脚输出相同。
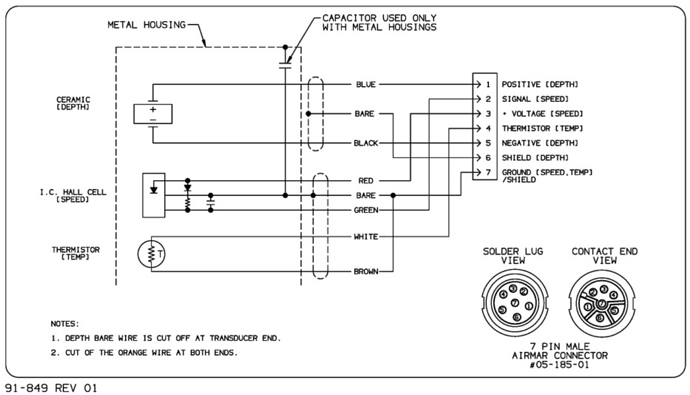
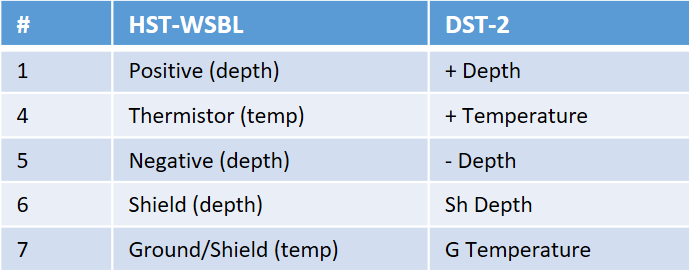
应将 Lowrance HST-WSBL 引脚连接到 DST-2 右侧的引脚上,如下图所示。请注意,Lowrance HST-WSBL 没有速度传感器,因此只需连接引脚 1 和 4-7。
DST-2 需要 10V 至 28V 的电源,这意味着它可以使用 3S 或 4S 锂电池供电。
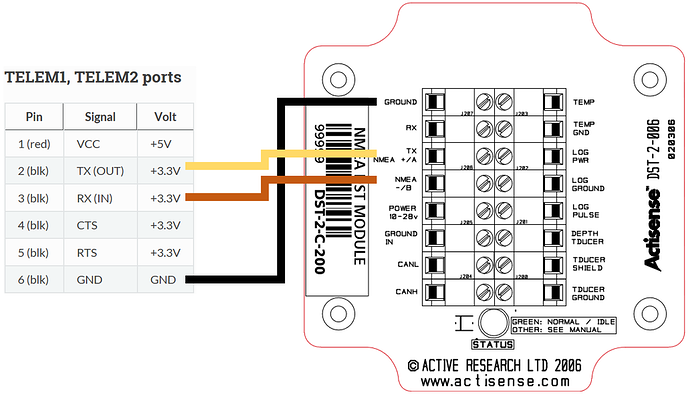
接下来应将 DST-2 左侧的引脚(串行和 RS-232 输出)连接到自动驾驶仪的遥测/串行输入端。最简单的连接方法是将 DST-2 的 5V 串行输出直接连接到自动驾驶仪遥测端口的 Tx、Rx 和公共接地。连接前最好查阅 DST-2 文档,但下面显示了 Pixhawk(或其他自动驾驶仪)的遥测引脚应如何连接到 DST-2 左侧的引脚。
通过地面站连接自动驾驶仪并设置以下参数(这些设置假定第一个传感器连接到 Telem2/Serial2)。
- SERIAL2_PROTOCOL = 9 (Lidar);
- SERIAL2_BAUD = 4 (4800 baud)。
然后应设置以下测距仪相关参数:
- RNGFND1_TYPE = 17 (NMEA);
- RNGFND1_MIN_CM = 13;
- RNGFND1_MAX_CM = 30000(即 30m)。这是测距仪能够可靠读取的距离,单位为厘米;
- RNGFND1_ORIENT = 25(即向下),如果安装在船上。
测试传感器
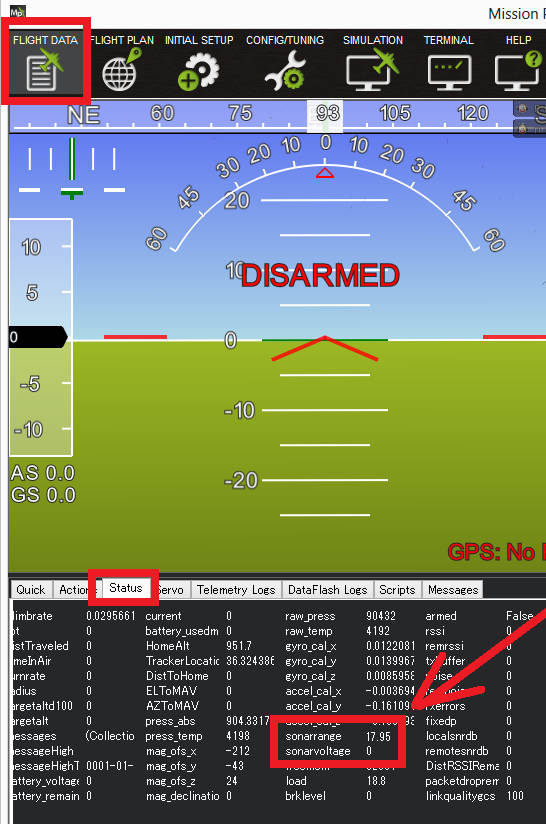
传感器读取的距离可在Mission Planner飞行数据屏幕的状态选项卡中查看。仔细查看"sonarrange"(声纳范围)。
3 参数说明
1、SERIAL2_PROTOCOL:串行2协议选择
注意:更改后需要重新启动。
控制 Serial2 端口应使用何种协议。请注意,Frsky 选项需要外部转换器硬件。详情请查看维基百科。
Values |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
2、RNGFND1_TYPE:测距仪类型
连接测距仪的类型。
Values |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|