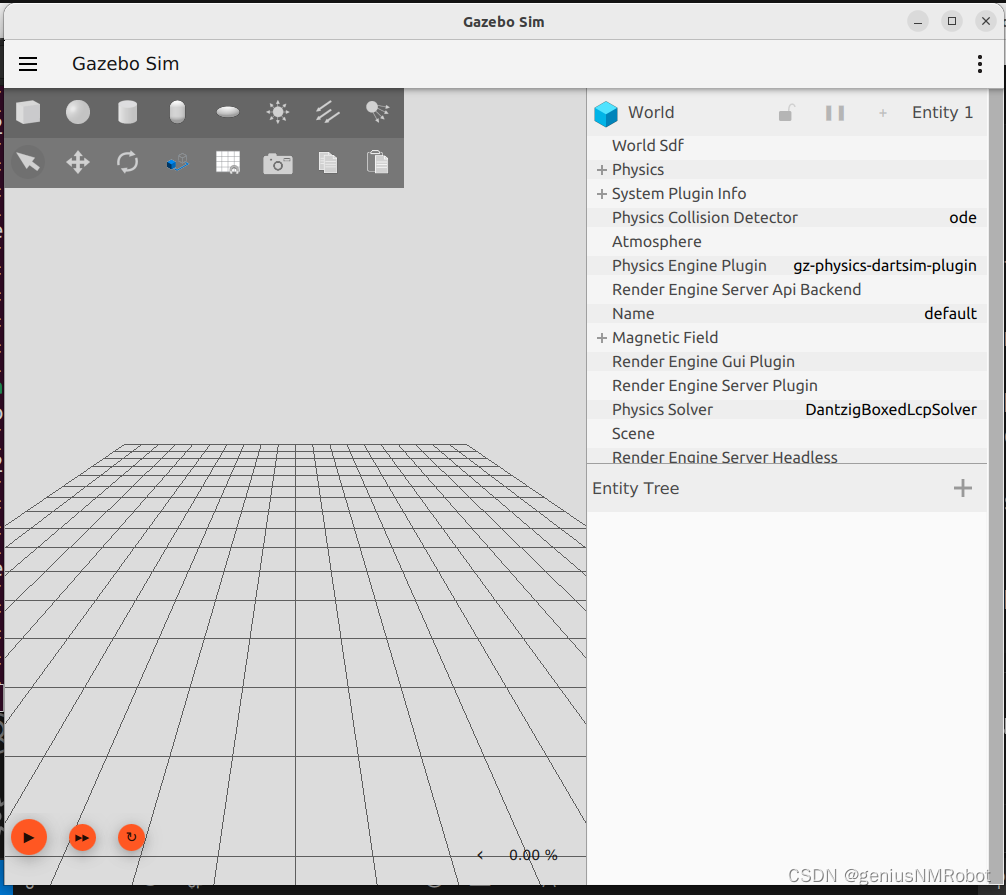
ros2 launch ros_gz_sim gz_sim.launch.py gz_version:=8
如果不输入gz_version:=8,默认就是6,启动的就是默认版本ign版本
左边那个是8,右边那个是6