Note that the symbols used in the pseudocode below have the following meanings:
MDP: Markov Decision Process;V(s): Value function, the avg reture of one state;π(s): Policy, in the sense that for a given states,π(s)represents the action that the agent will take in that state according to the policy, usually can be divided into a random manner or a deterministic manner;R(s,a): Immediate reward when taking actionain states;P(s'|s,a): Transition probability from statesto states'under an actiona;γ: Discount factor for future reward.
Value iteration:
function ValueIteration(MDP):
// MDP is a Markov Decision Process
V(s) = 0 for all states s // Initialization
repeat until convergence:
delta = 0
for each state s:
v = V(s)
V(s) = max over all actions a of [ R(s, a) + γ * Σ P(s' | s, a) * V(s') ]
delta = max(delta, |v - V(s)|)
return V // Optimal value function
function ExtractOptimalPolicy(MDP, V):
// MDP is a Markov Decision Process, V is the optimal value function
for each state s:
π(s) = argmax over all actions a of [ R(s, a) + γ * Σ P(s' | s, a) * V(s') ]
return π // Optimal policyPolicy iteration:
function PolicyIteration(MDP):
// MDP is a Markov Decision Process
Initialize a policy π arbitrarily
repeat until policy converges:
// Policy Evaluation
V = EvaluatePolicy(MDP, π)
// Policy Improvement
π' = GreedyPolicyImprovement(MDP, V)
if π' = π:
break // Policy has converged
π = π'
return π // Optimal policy
function EvaluatePolicy(MDP, π):
// MDP is a Markov Decision Process, π is a policy
V(s) = 0 for all states s // Initialization
repeat until convergence:
delta = 0
for each state s:
v = V(s)
V(s) = Σ P(s' | s, π(s)) * [ R(s, π(s)) + γ * V(s') ]
delta = max(delta, |v - V(s)|)
return V // Value function under the given policy
function GreedyPolicyImprovement(MDP, V):
// MDP is a Markov Decision Process, V is a value function
for each state s:
π(s) = argmax over all actions a of [ R(s, a) + γ * Σ P(s' | s, a) * V(s') ]
return π // Improved policy
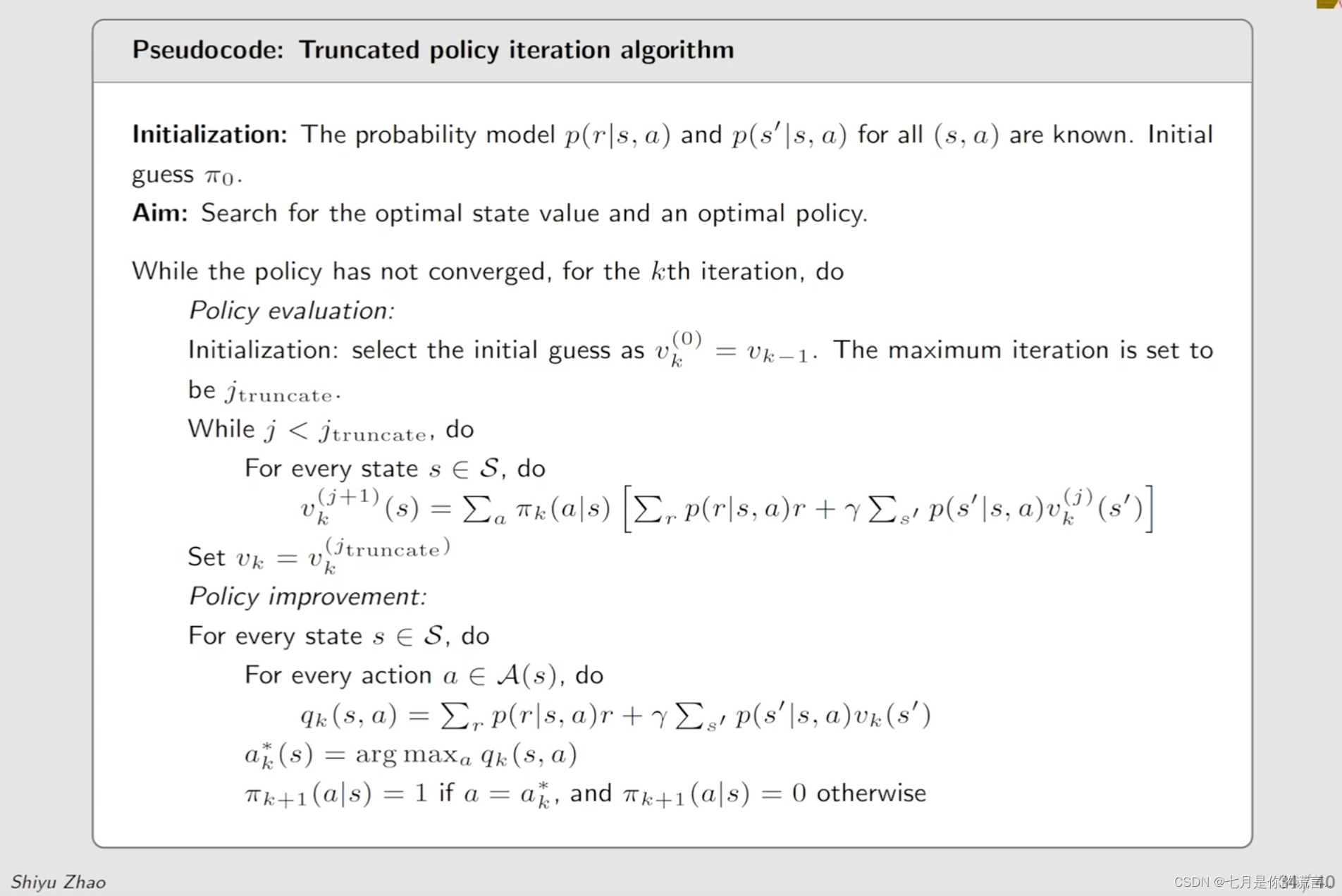
given the shiyu Zhao's course [1] ppt :

References: